







Zahlungen und Sicherheit
Ihre Zahlungsinformationen werden sicher verarbeitet. Wir speichern keine Kreditkartendaten und haben keinen Zugriff auf Ihre Kreditkarteninformationen.
In diesem Bundle enthalten
- 1 X RB-Lyn-1221 - Lynxmotion SES-PRO 900mm 5 & 6Dof Modular Robotic Arm Sub Kit EU
- 2 X RB-Lyn-1158 - Lynxmotion Smart Servo PRO Lite Modularer Dehnungswellen-Getriebeaktuator (LSS-P-L1)
- 2 X RB-Lyn-1159 - Lynxmotion Smart Servo PRO Standard Modularer Dehnungswellen-Getriebeaktuator (LSS-P-S1)
- 2 X RB-Lyn-1160 - Lynxmotion Smart Servo PRO Mega Modularer Dehnungswellen-Getriebeaktuator (LSS-P-M1)
- 1 X RB-Hap-13 - Lynxmotion SES-PRO 100-240VAC to 36VDC 30A Power Supply w/ Emergency Stop
Beschreibung
- Modularer, anpassbarer & rekonfigurierbarer halbprofessioneller Arm
- Einfach zu bedienen mit menschenlesbarem Kommunikationsprotokoll
- Hohe Genauigkeit und wettbewerbsfähige Tragfähigkeit
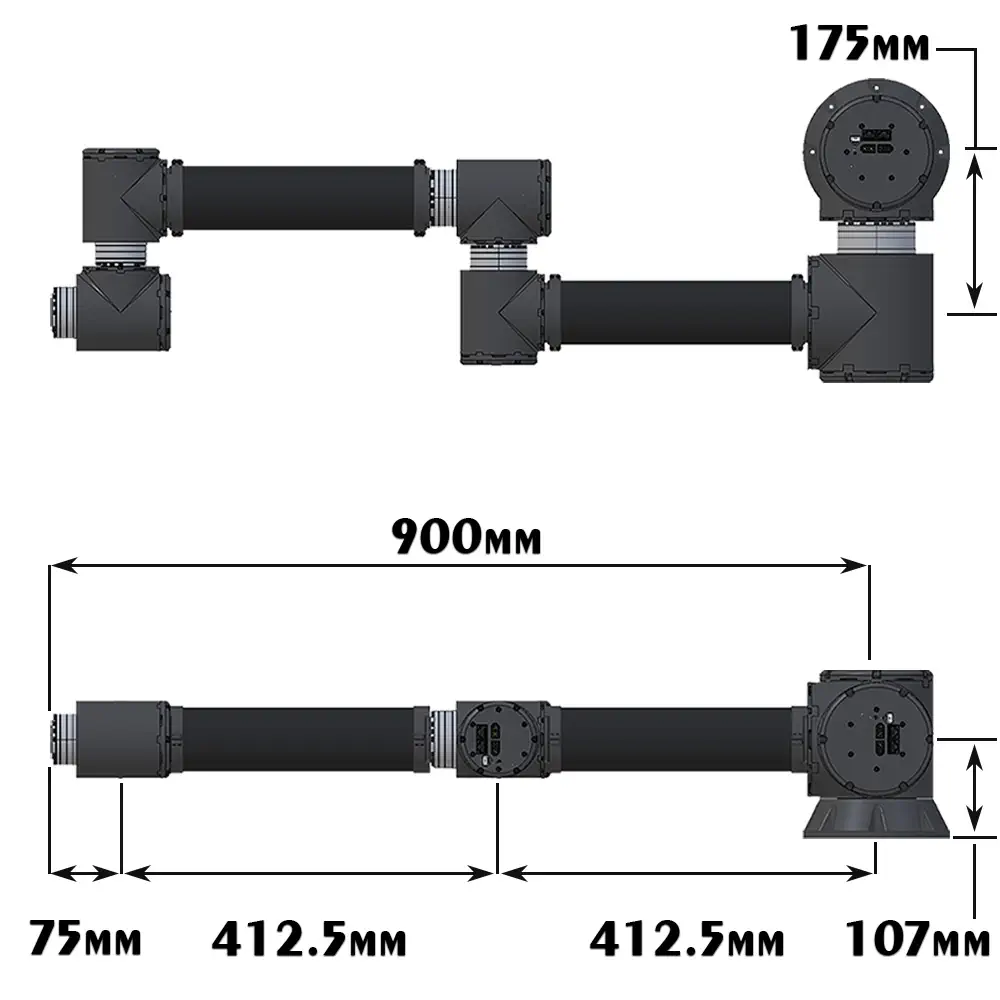
- 900mm horizontale Ausdehnung
- 3kg Tragfähigkeit und ±0,1 mm Genauigkeit bei voller Reichweite
- Greifer separat erhältlich
![]()
Der Lynxmotion SES-PRO 900mm 6Dof Modularer Roboterarm Kit bietet eine Tragfähigkeit von 3Kg bei voller Ausdehnung mit einer Genauigkeit von ±0,1 mm. Im Gegensatz zu speziell entwickelten Armen ist dieser modular und rekonfigurierbar, um den Anforderungen des Benutzers gerecht zu werden. Zusätzliche Freiheitsgrade können hinzugefügt werden, und bestehende Freiheitsgrade können umkonfiguriert oder entfernt werden. Das Design stellt sicher, dass es keine offensichtlichen Quetschstellen gibt.

Lynxmotion SES-PRO Modulares Robotik-Bausystem
Integriert sechs Lynxmotion Professional Smart Servo Aktuatoren
- Strain Wave Getriebe
- NEMA Schrittmotoren
- Onboard-Elektronik
- Mikrokontroller
- Motorsteuerung
- Spannungsregelung
- IMU (Beschleunigung & Gyro)
- CAN Kommunikation
- Absolutes Winkel-Feedback
- Menschenlesbares Kommunikationsprotokoll
- … mehr

DH-Robotics 2 & 3 Finger Greifer gezeigt auf dem Lynxmotion SES-PRO 550mm 5Dof Arm Kit
Die modularen Roboterarme SES-PRO von Lynxmotion werden vollständig von ROS2 unterstützt und bieten eine nahtlose Integration für Benutzer, die sie in verschiedene Roboterprojekte integrieren möchten. Diese Arme sind für die Arbeit mit dem ROS2-Framework konzipiert und ermöglichen eine robuste Kommunikation, Steuerung und Anpassung durch standardmäßige ROS2-Tools und -Bibliotheken. Umfassende ROS2-Unterstützung ist über das offizielle GitHub-Repository verfügbar, wo Benutzer auf dedizierte Pakete für eine einfache Einrichtung und Bereitstellung zugreifen können. Diese Kompatibilität gewährleistet eine reibungslose Integration in eine breite Palette von Anwendungen, von Forschung und Entwicklung bis hin zu fortgeschrittenen Automatisierungsaufgaben.
- 2x Lynxmotion Smart Servo PRO Lite (LSS-P-L1)
- 2x Lynxmotion Smart Servo PRO Standard (LSS-P-S1)
- 2x Lynxmotion Smart Servo PRO Mega (LSS-P-M1)
- 4x Lynxmotion SES-PRO Aluminiumklemme für 70mm CF Rohre
- 2x Lynxmotion SES-PRO 280,5mm x 70mm Kohlefaserrohre
- 1x Lynxmotion SES-PRO Basis für Lite oder Standard LSS-P Aktuatoren
- 1x Lynxmotion SES-PRO Arm Basis Anpassungsplatte
- 2x Lynxmotion Gebrandete Neopren Rohrabdeckungen
- 36V Netzteil
- Kabel (USB, CAT5, Strom)
- Montage Hardware
Kompatible Greifer:
- Lynxmotion SES-PRO DH Robotics PGE-50-40 Zwei-Finger-Greifer-Set
- Lynxmotion SES-PRO DH Robotics CGE-10-10 Drei-Finger-Greifer-Kit

DH-Robotics Zwei Finger PGE-50-40 & Drei Finger CGE-10-10
- Reichweite: 900mm
- Wiederholgenauigkeit: Bald verfügbar
Webseiten
- SES-PRO Modulares Robotersystem
- SES-PRO Roboter-Manipulatorarme
- Github SES-P-ROS2-Arms
- Github LSS-P-ROS2-Hardware
Wikis
- Lynxmotion SES-PRO 900mm 6 Dof Roboterarm Informationen & Anleitungen
- Lynxmotion SES-PRO Roboterarm Benutzeroberfläche Software
Blog
- Ein Vorgeschmack auf Lynxmotions bevorstehendes professionelles modulares Robotik-Bausystem
- Modulare Roboterarme von Lynxmotion PRO unterstützen jetzt ROS2!
Verwandt
Allgemein
- Horizontale Reichweite: 900mm
- Vertikale Reichweite: 1007mm
- Freiheitsgrade (DoF): 6
- Tragfähigkeit: 3Kg (kein Greifer) bei voller Reichweite
- Kollisionsdetektion: Nein
Mechanisch
- Vertikale Reichweite: 630mm
- Gelenk 1: M1 ±360° (Kabelspiel)
- Gelenk 2: M1 ±180°
- Gelenk 3: S1 ±180°
- Gelenk 4: S1 ±180°
- Gelenk 5: L1; ±180°
- Gelenk 6: L1; ±180°(verkabelter Greifer) oder unendlich
- Motoren: Schrittmotor (NEMA 34, 23, 17)
- Getriebe: 100:1 Stahl Strain Wave (auch bekannt als “Harmonic Drive”)
- Rohrmaterial: Kohlefaser
- Gelenkmaterial: bearbeitetes Aluminium
Elektrisch
- Stromversorgung: 120V - 220V AC zu 36V DC
- Not-Aus-Taste & Schutzsicherung
- Typ B (USA) Stecker (Standard Stromkabel)
- Batteriealternative: 8 Zellen (8S) oder 9 Zellen (9S)
- Verkabelung: extern
Kommunikation
- Kommunikationsmethode zwischen Servos: CAN Bus (benutzerdefiniert)
- Kommunikationsmethode zum ersten Servo: USB (USB 3 empfohlen)
- Kommunikationsprotokoll: LSS-P (menschenlesbar)