")
")
")
")
")
")






Zahlungen und Sicherheit
Ihre Zahlungsinformationen werden sicher verarbeitet. Wir speichern keine Kreditkartendaten und haben keinen Zugriff auf Ihre Kreditkarteninformationen.
Beschreibung
- Lynxmotion Smart Servo PRO Standard (LSS-P-S1)
- Konfigurierbarer, professioneller, modularer Smart-Servomotor
- Teil des Lynxmotion Servo Erector Set PRO (SES-PRO)
- Bis zu 80 Nm dynamisches Drehmoment bei 36V
- Spannungswellengetriebe, STM32-Mikrocontroller, Sensor-Feedback
![]()
Der Lynxmotion Smart Servo PRO Standard Modularer Dehnungswellen-Getriebeaktuator (LSS-P-S1) ist ein fortschrittlicher, konfigurierbarer Roboteraktuator und bietet ein unglaubliches Drehmoment-Gewichts-Verhältnis. Zu den Hauptmerkmalen gehören ein an einen Schrittmotor mit hohem Drehmoment gekoppeltes Spannungswellengetriebe, integrierte Elektronik mit Sensorrückmeldung und absoluter Positionierung sowie die Möglichkeit, mehrere Servos miteinander zu verketten. Schließen Sie einfach den USB-Anschluss und die Stromversorgung an, und schon kann es losgehen. Mit der LSS PRO Config-Software können Sie ganz einfach eindeutige IDs zuweisen und zusätzliche PRO-Servos zum Bus hinzufügen.

Modulares Roboterbausystem Lynxmotion SES-PRO
Die Lynxmotion Smart Servos (LSS) PRO-Aktuatoren sind vielseitige Aktuatoren, die eine deutlich leistungsstärkere und genauere Weiterentwicklung der Hobby-Aktuatorserie Lynxmotion Smart Servo (LSS) für den Einsatz in semiprofessionellen oder professionellen Roboterarmen mit mehreren Freiheitsgraden darstellen , Animatronik, Forschungsprojekte und mehr. Die PRO-Reihe umfasst derzeit drei Servos, von denen zwei physikalisch ähnlich aussehen und die gleiche Kappe und Platte haben, sich jedoch im maximalen Drehmoment und der maximalen Geschwindigkeit sowie der Getriebegröße und -montage unterscheiden. Der dritte Aktuator ist physisch der größte der drei und bietet das höchste Drehmoment.

Lynxmotion PRO 6-Achsen-Roboter-Manipulatorarm-Konzept
Die Servos bilden die Basis des Lynxmotion Servo Erector Set Professional modularen Roboterbausystems (SES PRO) der nächsten Generation und eine Vielzahl modularer Halterungen, Mechaniken und Elektronik wurden um sie herum entwickelt. „Intelligent“ bedeutet, dass die Parameter jedes Servos vom Benutzer geändert und konfiguriert werden können, dass es Sensorrückmeldungen und integrierte Sicherheitsfunktionen gibt und dass es, obwohl es für den Anschluss an einen Computer gedacht ist, an einen Mikrocontroller oder ein Gerät mit CAN-Kommunikation angeschlossen werden kann. Das benutzerdefinierte serielle PRO LSS-Kommunikationsprotokoll basiert auf dem LSS- und SSC-32/32U-Protokoll und macht die Kommunikation mit, Steuerung und Konfiguration dieser PRO-Servos einfach und intuitiv.

Lynxmotion PRO Hexapod-Laufroboter-Konzept
Der Haupt-STM32-Mikrocontroller ist mit einem benutzerdefinierten Bootloader und einer benutzerdefinierten Firmware vorinstalliert, sodass die Servos mit allen Komponenten auf der Leiterplatte (Motorsteuerung, CAN-Chip, USB, IMU) kommunizieren können, und enthält das Lynxmotion PRO-Kommunikationsprotokoll. Fortgeschrittene Benutzer, die ihren eigenen benutzerdefinierten Code/Firmware erstellen möchten, können die Arduino IDE (über STMduino) und den verfügbaren Testcode verwenden.

Lynxmotion PRO Humanoides Roboterkonzept
Merkmale:
- Vollmetall-Wellengetriebe gekoppelt mit einem leistungsstarken NEMA 14-Schrittmotor, der ein hohes Drehmoment bei niedrigen Drehzahlen bietet.
- USB-Eingang und CAN-BUS-Kommunikation
- Für Menschen lesbares LSS Pro-Kommunikationsprotokoll (Aktionen, Abfragen, Konfigurationen)
- Verkettet: RJ45 und XT60
- Rückmeldung: Position, Temperatur, IMU, Betriebsstatus und mehr
- 36V Nenneingangsspannung
- STM32-Mikrocontroller, Schrittregler und 16-Bit-Magnetkodierer
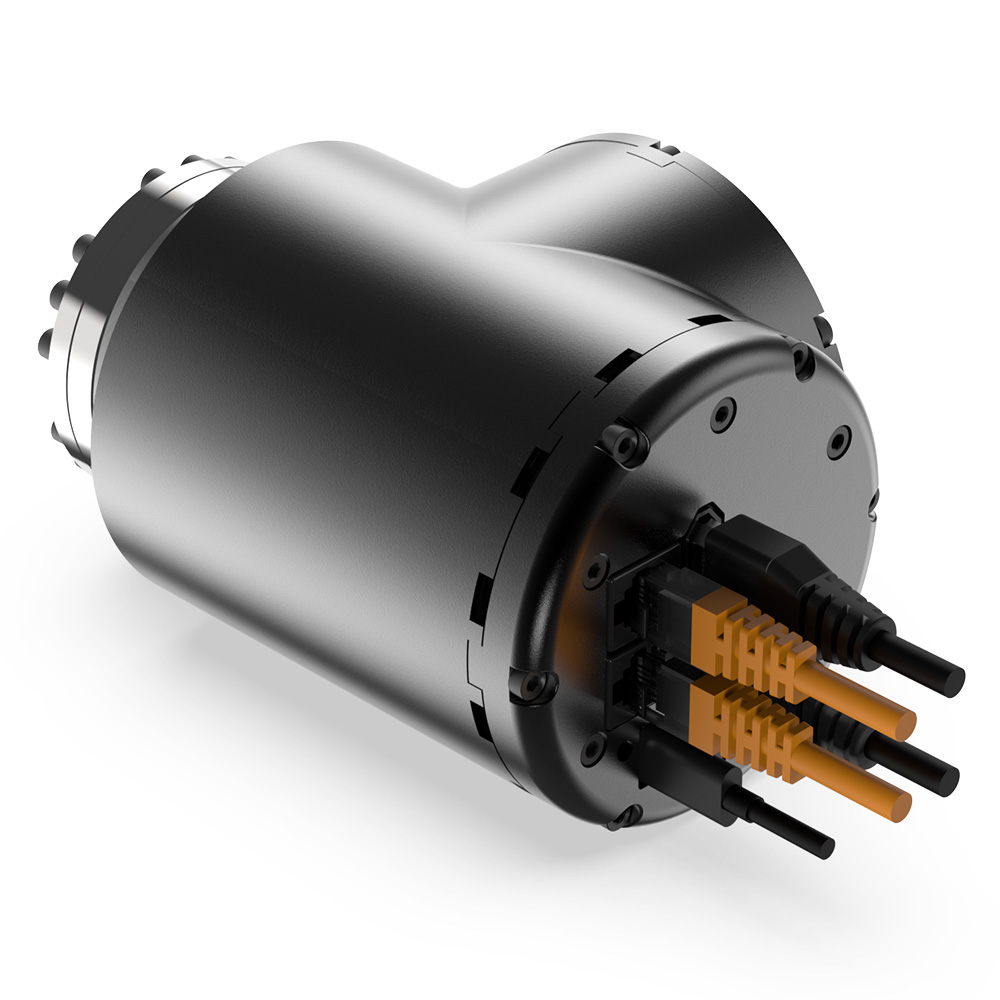
Lynxmotion Smart Servo PRO-Verkabelung
Die Lynxmotion Smart Servo PRO (LSS-P)-Aktuatoren werden in ROS2 durch die LSS-P ROS2-Hardwareschnittstelle vollständig unterstützt. Diese Integration ermöglicht eine nahtlose Kommunikation und Steuerung dieser hochpräzisen modularen Aktuatoren innerhalb des ROS2-Ökosystems. Durch die Nutzung der bereitgestellten Hardwareschnittstelle können Benutzer die Aktuatoren für eine breite Palette von Roboteranwendungen einfach konfigurieren, überwachen und steuern. Die Schnittstelle unterstützt Echtzeitaktualisierungen, Positionskontrolle und Feedbackmechanismen und gewährleistet so robuste Leistung und Anpassungsfähigkeit. Egal, ob Sie Roboterarme, mobile Plattformen oder andere komplexe Systeme entwickeln, die ROS2-Unterstützung für Lynxmotion Smart Servo PRO-Aktuatoren vereinfacht die Integration, verbessert die Funktionalität und beschleunigt die Entwicklung.
- 1x Lynxmotion Smart Servo PRO Standardantrieb (LSS-P-S1)
- 1x USB-Kabel (A auf C)
- 1x RG45 Kommunikationskabel (CAN-Bus)
- 1x Stromkabel mit XT60
- Nennspannung (empfohlen): 36 V
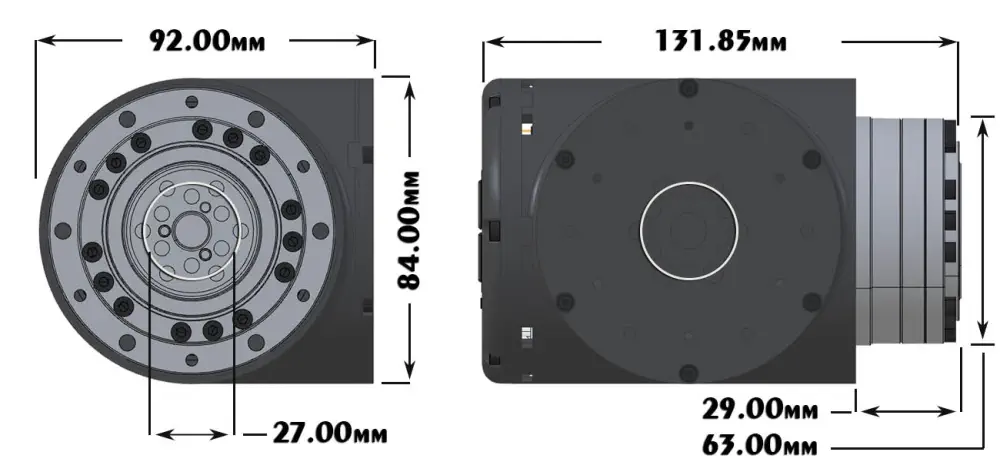
- Max. Drehmoment: 80 Nm
- Max. Geschwindigkeit: 15 U/min oder 90 Grad/s (25 Nm)
- Gleichstrommotor: Bipolarer Schrittmotor NEMA 17
- Übersetzungsverhältnis: 1:100
- Kommunikationstyp: Seriell (über USB) oder CAN (Bus)
- Kommunikationsprotokoll: Custom Lynxmotion Smart Servo (LSS)
- Betriebswinkel: 360° absolut und virtueller Multiturn
- Anschlüsse: USB, RJ45, XT60
- Gewicht: 1,52 kg