





Inbegrepen in deze bundel
- 1 X RB-Rpk-29 - Slamtec RPlidar S3 360° Laser Scanner (40 m)
- 1 X RB-Rpk-42 - Slamtec Slamkit Mapping & Lokalisatie oplossing (ontwikkelaarseditie)
Description
- Slamtec Slamkit & S3 Lidar Mapping & lokalisatieoplossing (ontwikkelaarseditie)
- Met Slamtec RPlidar S3 360° laserscanner (40 m)
- Nauwkeurige detectie over lange afstanden en objectdetectie met hoge resolutie
- Verbetert de schaalbaarheid en stabiliteit van mobiele robotica
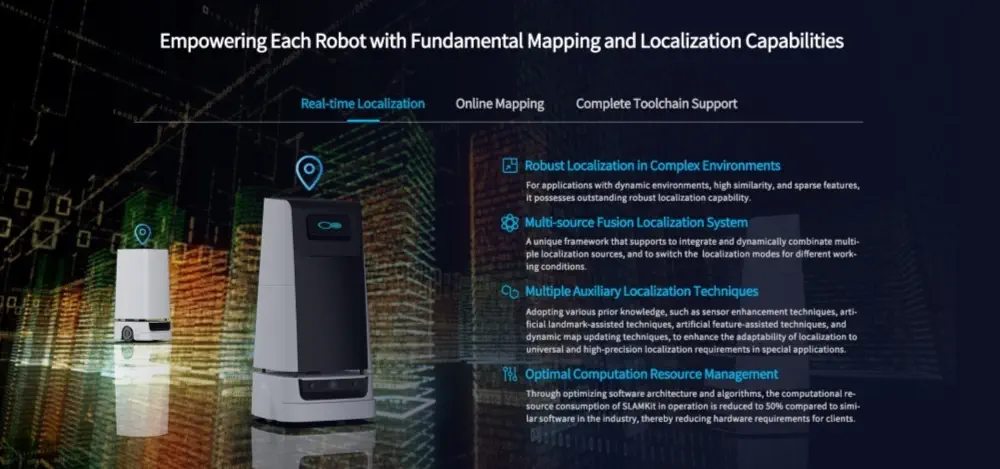
- Biedt robuuste lokalisatie in complexe omgevingen
- Kaartgebied: 150 x 150 m
- Inclusief uitgebreide SDK-ontwikkelkit
De Slamtec Slamkit & S3 Lidar Mapping & lokalisatieoplossing (Developer Edition) is het eerste commerciële aanbod in de sector dat onafhankelijk mapping- en lokalisatiefunctionaliteiten biedt, waardoor de schaalbaarheid en stabiliteit van mobiele robotica aanzienlijk wordt verbeterd. Deze oplossing kan via softwarelicenties worden ingebed in de controller van een robot, waardoor autonome mapping en lokalisatie mogelijk wordt. Het maakt eenvoudige aanpassing van robottoepassingen mogelijk via gestandaardiseerde software-interfaces.
De RPlidar S3 360°-laserscanner (40 m) is een goedkope 360-graden 2D-laserscanner (LIDAR)-oplossing van de volgende generatie, ontwikkeld door SLAMTEC. Er kunnen tot 32.000 lasermonsters per seconde worden opgenomen met een hoge rotatiesnelheid. Uitgerust met contactloze stroom- en signaaloverdrachttechnologie, doorbreekt het de levensbeperking van traditionele LIDAR-systemen om langdurig stabiel te werken.
De RPLIDAR S3 is een 2D-laserscanner, die een 2D-scan van 360 graden kan uitvoeren binnen een bereik van 40 meter en een 2D-puntenwolkkaart kan produceren van de ruimte waar deze zich bevindt. De gegenereerde 2D-puntenwolkgegevens kunnen worden gebruikt bij het in kaart brengen, robotlokalisatie, robotnavigatie en object- of omgevingsmodellering.
Vergeleken met andere RPLIDAR-series heeft RPLIDAR S3 stabielere prestaties bij het detecteren van objecten op lange afstanden, objecten in wit of zwart als alternatief, en objecten in direct zonlicht, wat ideaal is voor het maken van kaarten in de buiten- of binnenomgeving binnen een straal van 40 meter variërende straal. Daarom kan het op grote schaal worden toegepast in veel consumentgerichte bedrijfsscenario's.

De typische scanfrequentie van RPLIDAR S3 is 10 Hz (600 rpm). Met de scanfrequentie van 10 Hz is de bemonsteringsfrequentie 32 kHz en de hoekresolutie 0,1125°. Dankzij de verbeteringen in de operationele prestaties van de SLAMTEC-hardware en de bijbehorende algoritmen, werkt RPLIDAR S3 goed in alle binnenomgevingen en buitenomgevingen met direct zonlicht. Ondertussen heeft elke RPLIDAR S3, voordat hij de fabriek verlaat, strenge tests doorstaan om ervoor te zorgen dat het uitgangsvermogen van de laser voldoet aan de oogveiligheidsnorm van IEC-60825 Klasse 1.
De RPLIDAR S3 wordt geleverd met een rotatiesnelheidsdetectie en adaptief systeem. Het systeem past de hoekresolutie automatisch aan op basis van de rotatiesnelheid. En het is niet nodig om een ingewikkeld energiesysteem voor de RPLIDAR te voorzien. Op deze manier bespaart het eenvoudige voedingsschema de stuklijstkosten. Als de werkelijke rotatiesnelheid van de RPLIDAR vereist is, kan het hostsysteem de gerelateerde gegevens verkrijgen via de communicatie-interface.

Slamkit biedt realtime en robuuste lokalisatiemogelijkheden, zelfs in complexe en dynamische omgevingen met veel overeenkomsten en schaarse functies. Het multi-source fusielokalisatiesysteem integreert en combineert op dynamische wijze meerdere lokalisatiebronnen, waarbij indien nodig van modus wordt gewisseld voor verschillende werkomstandigheden. Diverse aanvullende lokalisatietechnieken, zoals sensorverbetering en dynamische kaartupdates, vergroten het aanpassingsvermogen aan lokalisatievereisten met hoge precisie.
De oplossing optimaliseert het computerresourcebeheer, waardoor het resourceverbruik met 50% wordt verminderd in vergelijking met vergelijkbare industriële software, waardoor de hardwarevereisten worden verlaagd. Het ondersteunt een kaartgebied van maximaal 150 x 150 m en maakt gebruik van SharpEdge™-kaartoptimalisatietechnologie om zeer nauwkeurige kaarten te maken met een nauwkeurigheid van 1,5 cm. Automatische en aanvullende detectiestrategieën voor lussluiting zorgen voor hogere succespercentages bij het in kaart brengen, en dynamische interfaces voor parameteraanpassing behouden de kaartkwaliteit.
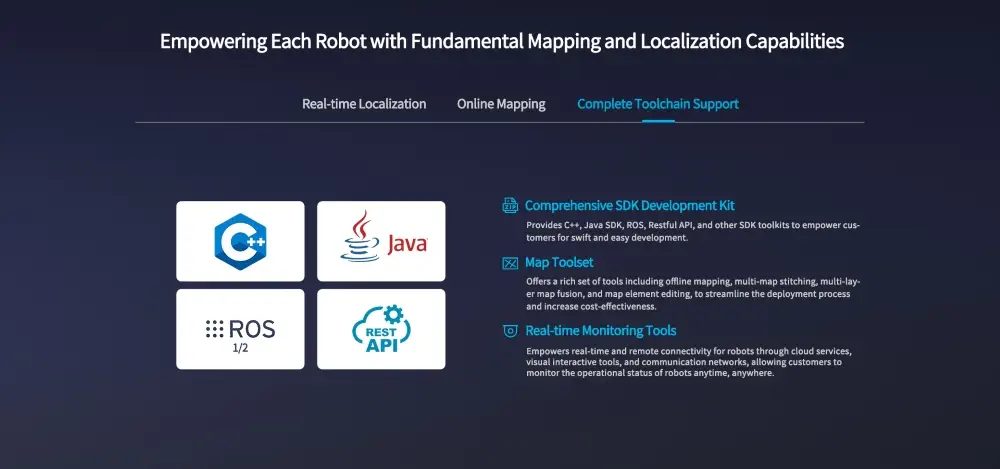
Slamkit bevat een uitgebreide SDK-ontwikkelkit, die C++, Java, ROS, Restful API en andere toolkits biedt voor snelle en gemakkelijke ontwikkeling. De kaarttoolset omvat offline kaarten, multi-map stitching, meerlaagse kaartfusie en kaartelementbewerking, waardoor de implementatie wordt gestroomlijnd en de kosteneffectiviteit wordt verhoogd. Realtime monitoringtools maken connectiviteit op afstand en monitoring van de operationele status mogelijk via cloudservices en visuele interactieve tools.
Slamkit ondersteunt veelgebruikte controllerhardware en -systemen, waaronder Intel- en ARM-architecturen en Ubuntu-systemen. De oplossing abstraheert een rijke set software-interfaces voor verschillende SDK-toolkits en biedt uitgebreide documentatie en voorbeeldcode. Het past zich aan verschillende scenario's aan, zoals huishoudelijk, schoonmaak-, industrieel, leverings- en inspectiescenario's, en zorgt voor een stabiele werking van de robot door middel van gediversifieerde parameterconfiguraties.
Slamkit biedt gestandaardiseerde methoden en hulpmiddelen voor prestatie-evaluatie om gepersonaliseerde robotproducten te valideren, waardoor de implementatietijd wordt verkort met visuele interactieve hulpmiddelen zoals Robostudio. Het biedt cloudgebaseerde implementatieservices voor het opslaan van historische gegevens en het gedeeltelijk bewerken van elementen. Voor bediening en onderhoud omvat Slamkit een runtime-gegevensregistratiesysteem en een offline gegevensafspeelsysteem voor snelle probleemoplossing, samen met cloudgebaseerde onderhoudsdiensten voor herstel op afstand.
Opmerking: Zorg voor een juiste behandeling en gebruik van de software om operationele verstoringen te voorkomen.
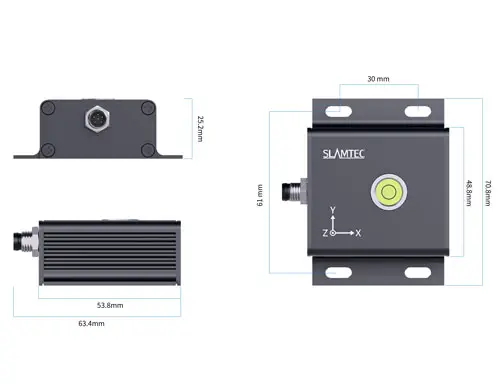
- 1x Slamkit-licentiekaart (ontwikkelaarseditie)
- 1x Slamkit-licentiesoftware Slamware (ontwikkelaarseditie)
- 1x Slamtec RPlidar S3 360° laserscanner (40 m)

RPlidar S3
- Nauwkeurigheid: ±30 mm
- Resolutie: 10 mm
- Proeffrequentie: 32 KHz
- Werkende Golflengte: 895 - 915 nm
- Laser Vermogen: 25 W
- Puls Lengte: 5 ns
- Scanning Frequentie: Typ. 10 Hz, 10 ~ 20 Hz
- Hoekresolutie: Typ. 0.1125°, 0.1125° ~ 0.225°
- Communicatie Interface: TTL, UART
- Communicatiesnelheid: 1M
- Scanveld Vlakheid: 0° - 1.5° (andere hoekvereisten kunnen worden aangepast)
- Afstandsbereik: Wit object: 0.05-40 m (onder 70% reflectie) | Zwart object: 0.05-15 m (onder 10% reflectie) | 0.05 - 5 m (onder 2% reflectie)
- Werktemperatuurbereik: -10 - 50 °C
- Opslagtemperatuurbereik: -20 - 60 °C
- Laser Veiligheidsklasse: Klasse 1
- Toepassingsscenario's: Ideaal voor zowel buiten- als binnenomgevingen met betrouwbare weerstand tegen daglicht (≥80 Klux)
- Gewicht: 115 g
Slamkit
- Kaartgebied: 150 x 150 m
- Kaartresolutie: 1 cm
- Gebruikstijd: 1.5h per cyclus
- Geen Upgrade Service
- Real-time lokalisatiefout typisch binnen ±5 mm, ±1°
- Maximale afstandsbereik: 50 m (typische waarde)
- Stelt robots in staat voor meer dan 2000 uur
- Gebruikt door meer dan 30.000 bedrijfseenheden
- Geïmplementeerd in meer dan 1000 bedrijfsprojecten
- Meer dan 3000 gevallen behandeld
- Hoge precisie kaartresolutie van 1 cm
- Lokalisatiestabiliteit behouden met tot 50% kaartverandering
- Ondersteunt SharpEdge™ kaartoptimalisatietechnologie