







Beschreibung
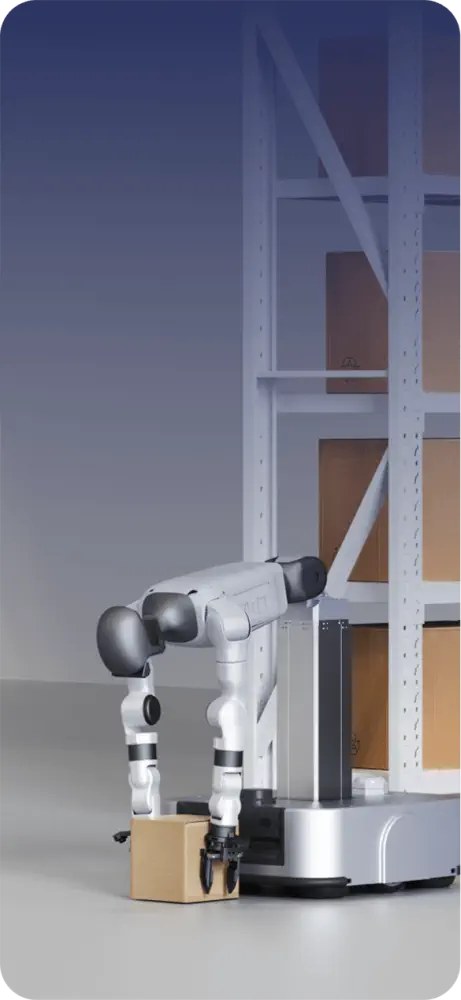
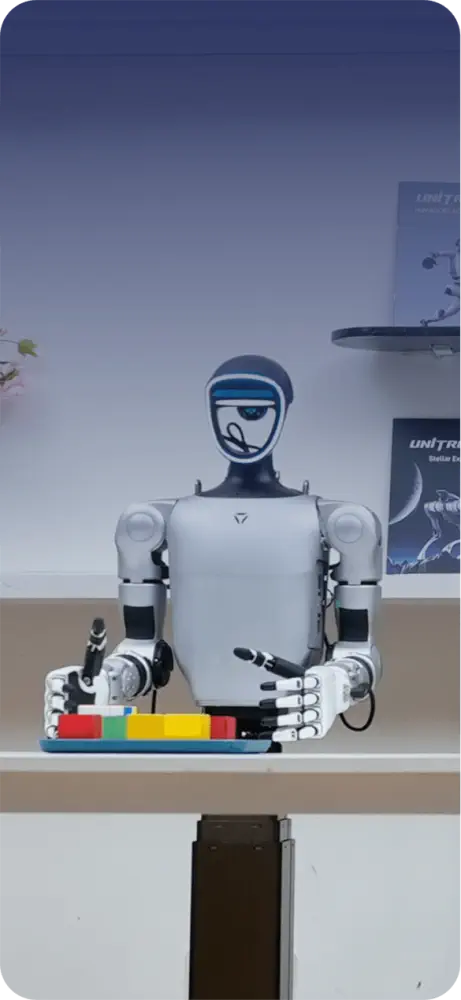
- Unitree G1-D Standard D Humanoid Robot Plattform (Revo 2 Basic Hands)
- Multi-Sensor-Wahrnehmungssystem
- Sekundäre Entwicklung unterstützt; Visualisierungscomputer enthalten
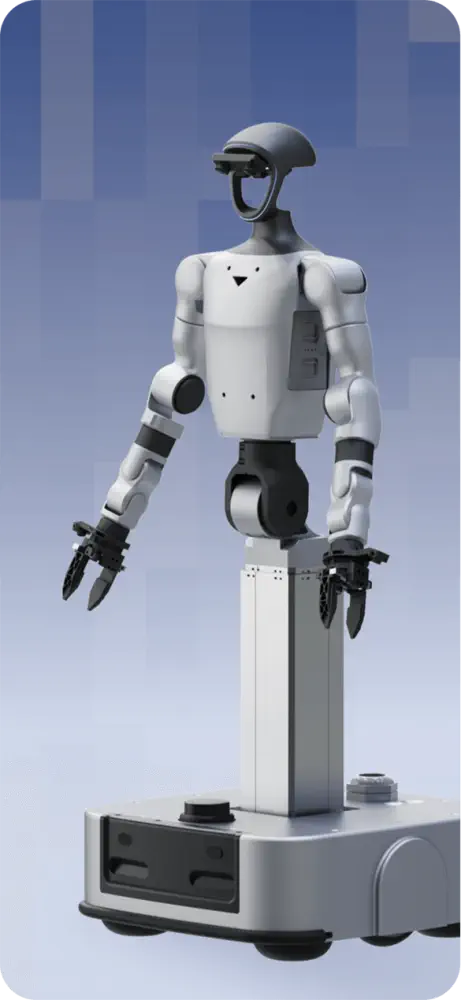
- Feststehende Basis mit dualem Arm humanoider Roboter
- BrainCo fünf-Finger geschickte Hände (mit Revo 2 Basic & RGB Kamera)
- Gesamtfreiheitsgrade: 29
Die Unitree G1-D Standard D Humanoid Robot Plattform (Revo 2 Basic Hands) ist die feststehende Basis G1-D Standard D Konfiguration, die zu den BrainCo Revo 2 fünf-Finger geschickten Händen (Basic Edition, RGB Kamera) wechselt und ein menschlicheres fünf-Finger-Griffprofil anstelle von drei-Finger-Geschicklichkeit betont.
Die G1-D Plattform ist um einen vollwertigen humanoiden Oberkörper mit einer 17-DOF kinematischen Struktur (ohne Endeffektor), einer vertikalen Hubsäule mit einem Hub von 500 mm für eine einstellbare Arbeitshöhe und einem integrierten Multi-Sensor-Wahrnehmungsstapel (kopfmontierte Binokularvision plus Handgelenkskameras) aufgebaut, um Manipulations- und Teleoperations-Workflows zu unterstützen; sie wird mit der Standardsteuerungselektronik/Softwarestapel und der erforderlichen Strom-/Ladeschnittstelle für den Einsatz geliefert. Als autorisierter Wiederverkäufer mit lokalem Support und Logistik fungiert RobotShop als einziger Ansprechpartner für den Kauf und den After-Sales-Service, wodurch Reibungen im Vergleich zu einem Direktkauf beim Hersteller reduziert und die Notwendigkeit vermieden wird, den Roboter für Support oder Problemlösungen ins Ausland zu versenden.

Echte Produkte mit herstellergeprüfter Garantieabdeckung.

Zoll, Inspektion und Vorbereitung werden lokal vor dem Versand abgewickelt.

Verkauf, Support und Rücksendungen werden von einem Team verwaltet.

Dokumente, Tutorials und Community-Antworten, um schneller voranzukommen.
für humanoiden Roboter
Proprietäre humanoide Plattformen, die von Anfang bis Ende mit eigenen Aktuatoren, Getriebesätzen, Encodern und integrierter Sensorik gebaut wurden.
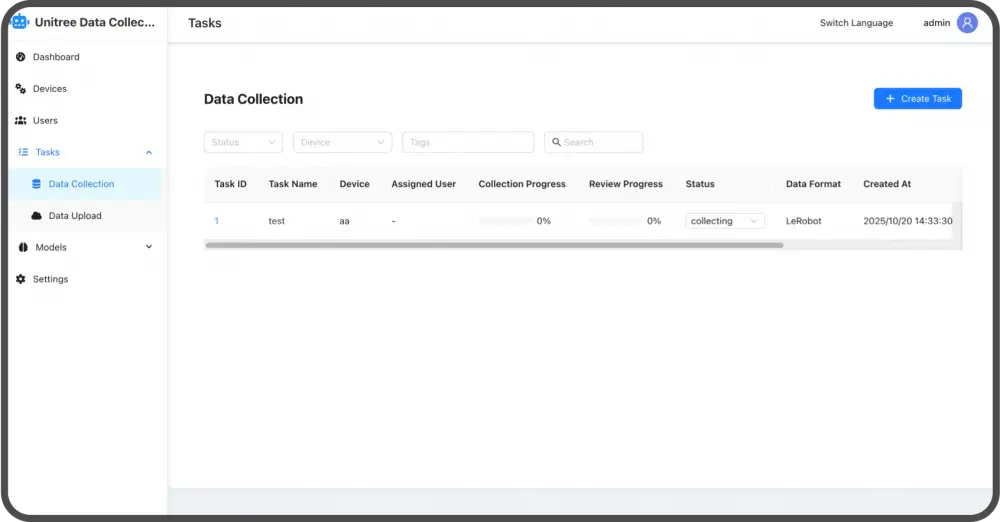
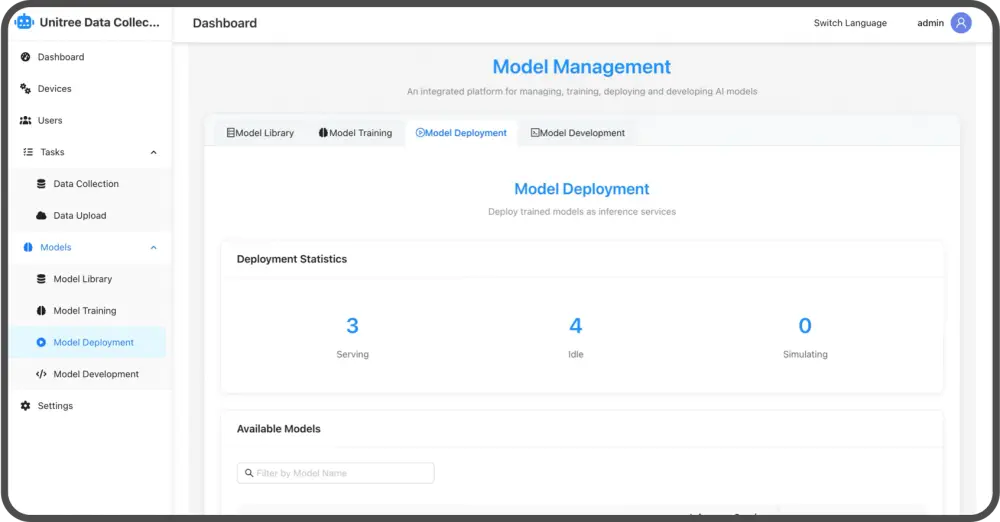
Ein einziger Workflow, der den gesamten Datenlebenszyklus abdeckt: Erfassung, Verarbeitung, Annotation, Validierung und Datenbestandsverwaltung.
Unterstützt verteiltes Training, benutzerdefinierte Modellerstellung und reibungslose Bereitstellung, mit Kompatibilität über führende Open-Source-Frameworks hinweg.



Beschleunigen Sie die Datenerfassung und senken Sie die Betriebskosten mit flexiblen, standardisierten Arbeitsabläufen – ersetzen Sie langsame, manuelle Methoden durch einen wiederholbaren Prozess.

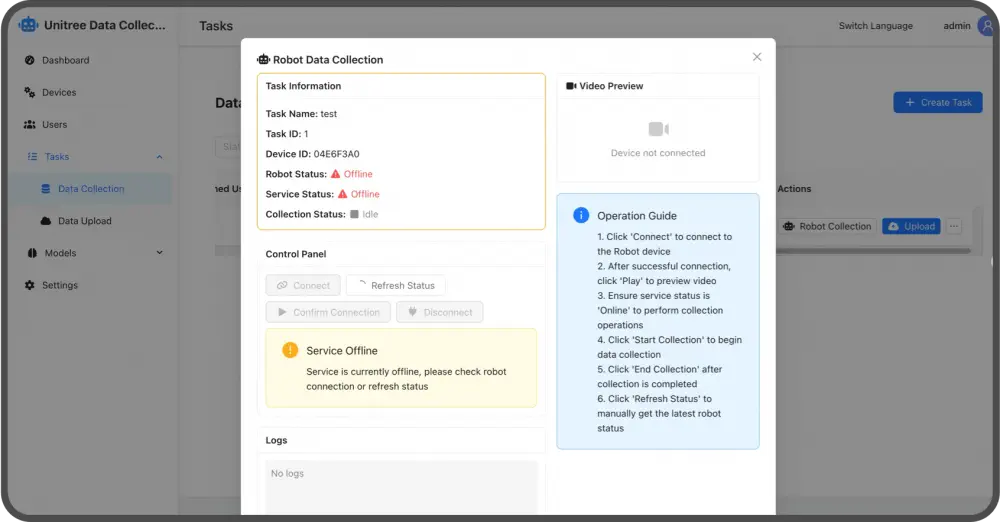
Kombiniert Projektkoordination, Aufgabenverteilung, Fortschrittsüberwachung und Statusberichterstattung in einem Arbeitsbereich. Mit wiederverwendbaren Vorlagen können Erfassungsaufgaben mit einem Klick erstellt werden. Echtzeit-Transparenz über die gesamte Pipeline verbessert die Zusammenarbeit und sorgt für einen reibungslosen Ablauf der Datenerfassung.
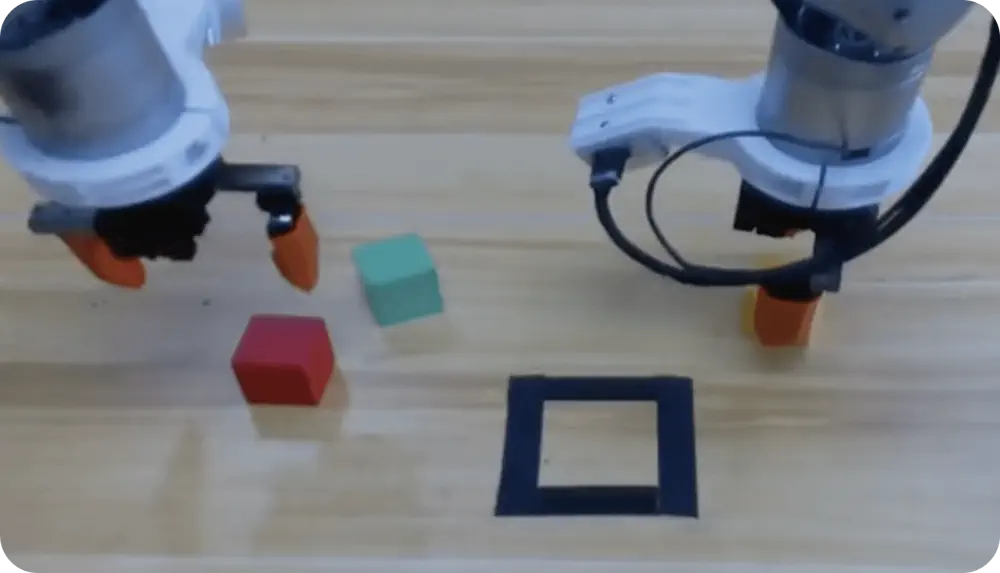
Unterstützt die Datenerfassung über mehrere Roboterplattformen und Endeffektorkonfigurationen. Starke Standardisierung verwandelt Eingaben von verschiedenen Geräten in konsistente, qualitativ hochwertige, trainingsbereite Datensätze durch einen End-to-End-Arbeitsablauf.
Entwickelt, um Hunderte von Robotern zu koordinieren, die synchronisierte Datenerfassung durchführen. Mit hochkonkurrenten Diensten und lastverteiltem Scheduling verarbeitet die Plattform zuverlässig große, Echtzeit-Datenströme.

Auf einer hochverfügbaren Dienstgrundlage aufgebaut, um eine zuverlässige 24/7-Erfassung zu unterstützen. Breite Formatkompatibilität ermöglicht es, Ausgaben direkt zu verwenden oder in weit verbreitete Trainingsformate zu konvertieren, was die F&E-Zyklen beschleunigt.
-
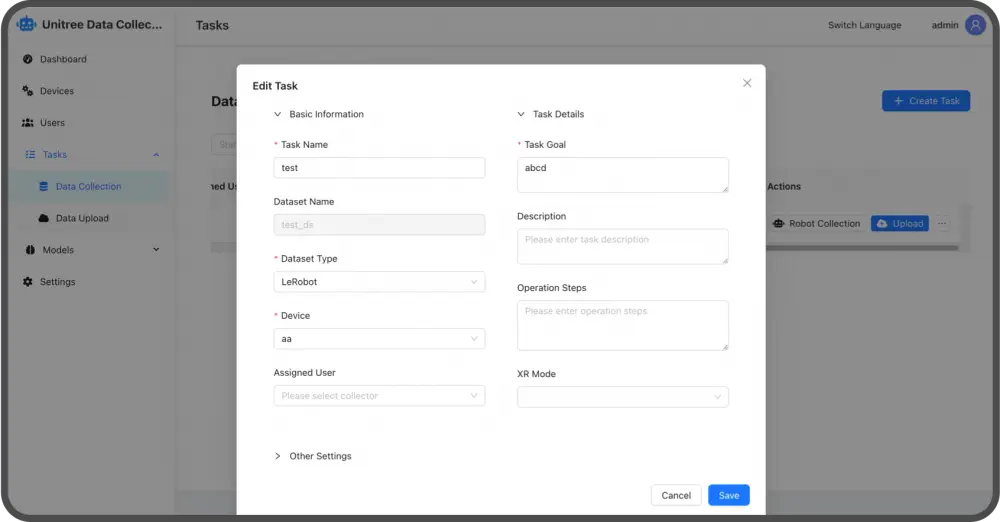
1Neue
Datenerfassungs-
aufgaben erstellen -
2Aufgabenaktualisierungen
und
Zuweisung -
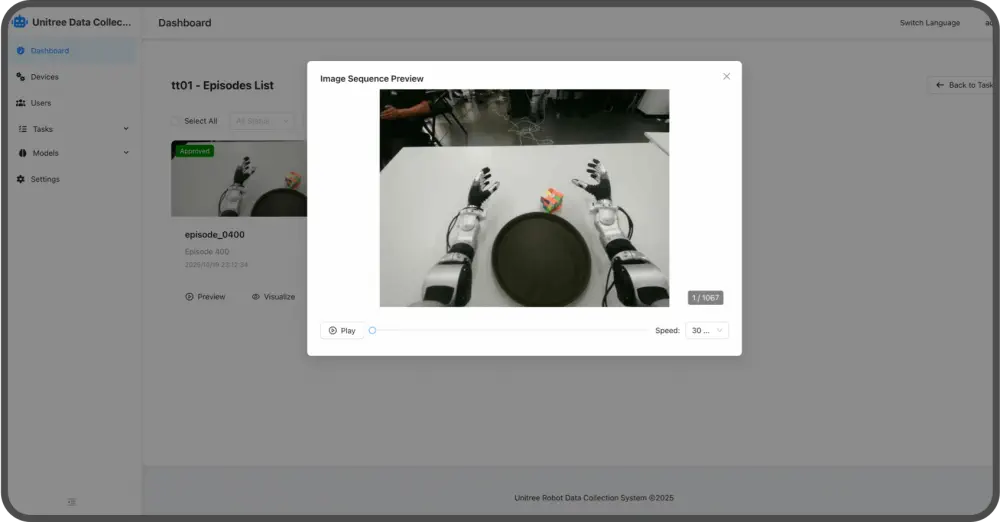
3Datenerfassung
und
Annotation -
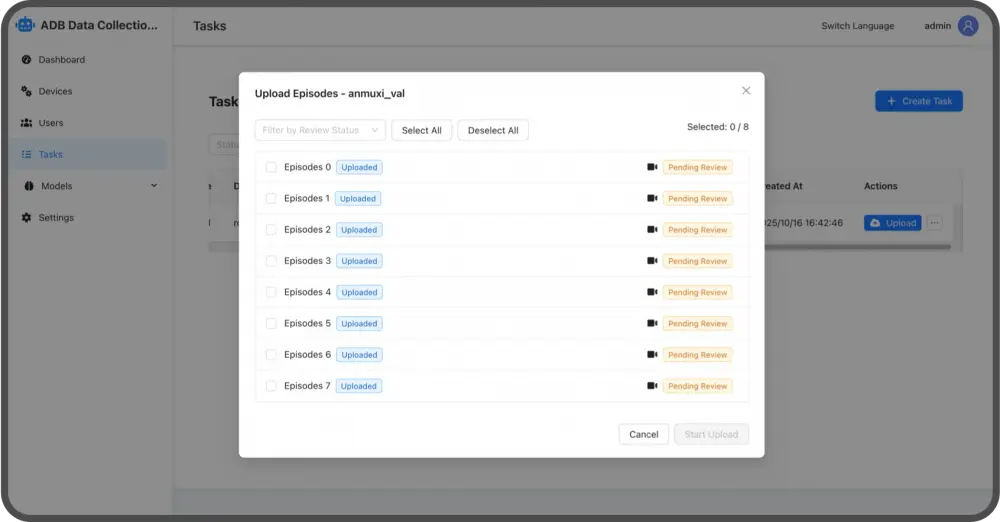
4Daten hochladen
und überprüfen -
5Datenarchivierung
-
6Datensatzexport
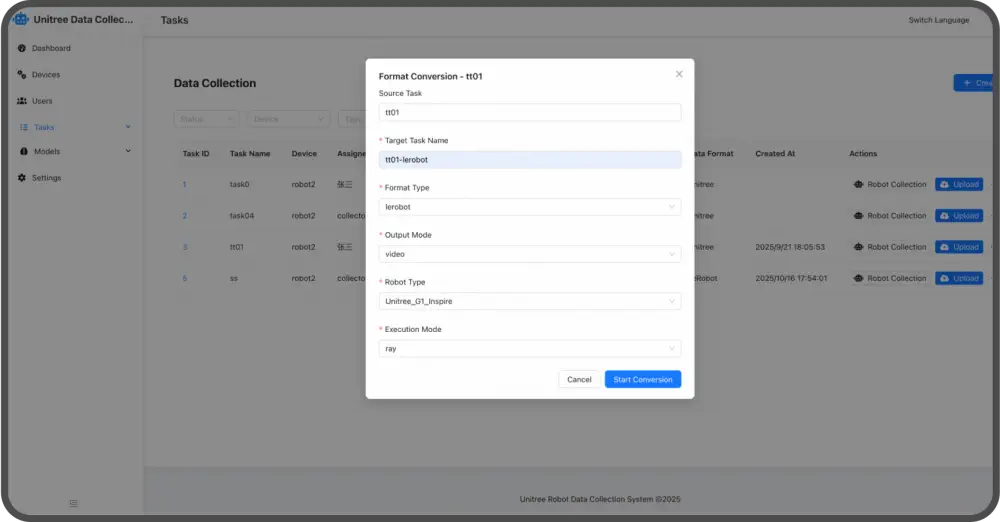
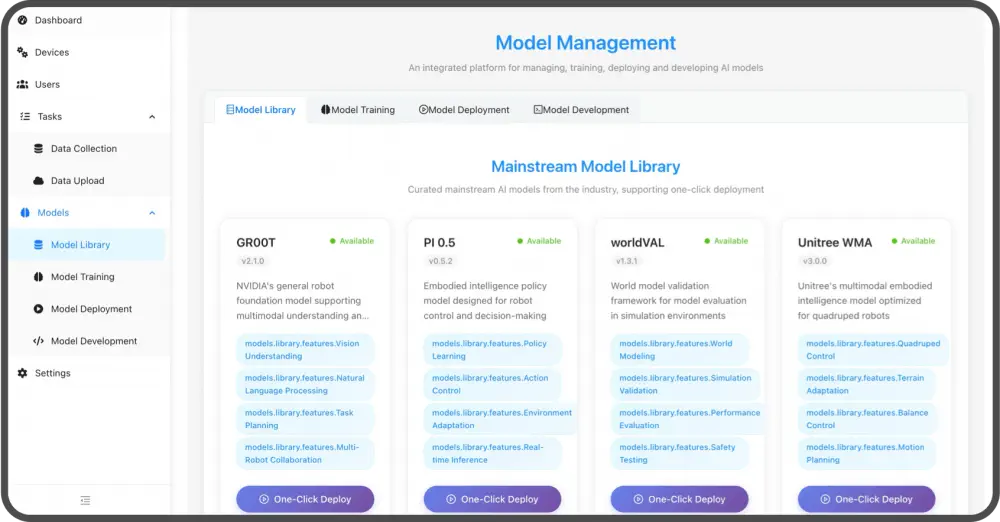
Deckt den gesamten Arbeitsablauf von der Datenvorbereitung bis zur Bereitstellung mit einem Klick ab. Die Plattform integriert sich nahtlos mit weit verbreiteten Open-Source-Roboter-Modell-Frameworks.
Ein offenes Modell-Ökosystem mit integrierten Community-Datensätzen und Unterstützung für das Training auf Open-Source-Datensätzen. Es bietet auch eine tiefe Integration mit führenden Open-Source-Modellen wie PI und GROOT.

Enthält eine hochpräzise, hochauflösende 3D-Asset-Bibliothek. Durch den Aufbau realistischer Simulationsszenen werden schnell umfassende Bewertungspläne erstellt, um die Algorithmusverifizierung zu unterstützen.

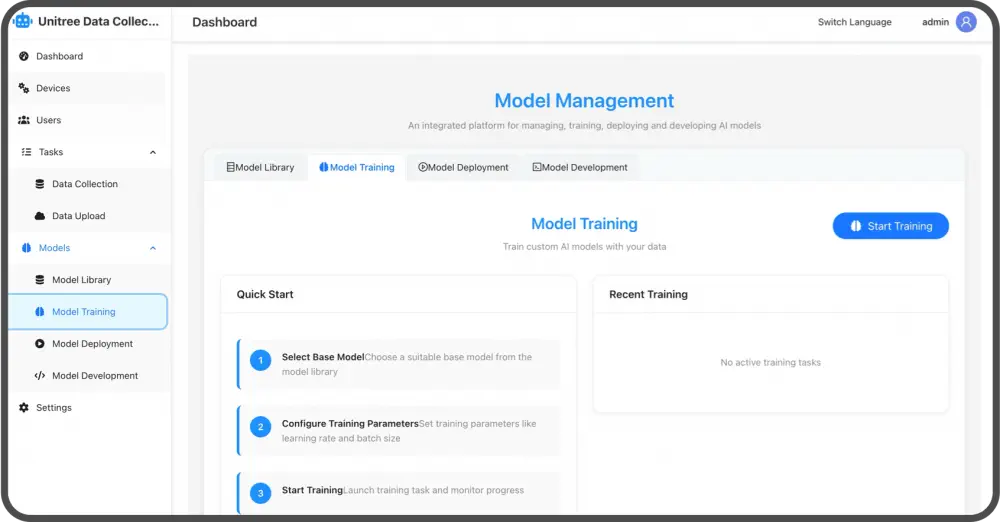
Sofort einsatzbereit, reduziert die Einrichtungszeit. Starten Sie die Entwicklung mit "One-Click-Training", nutzen Sie integrierte Simulationen für eine zuverlässige Bewertung und wechseln Sie nahtlos von Algorithmen zu realen Maschinen.
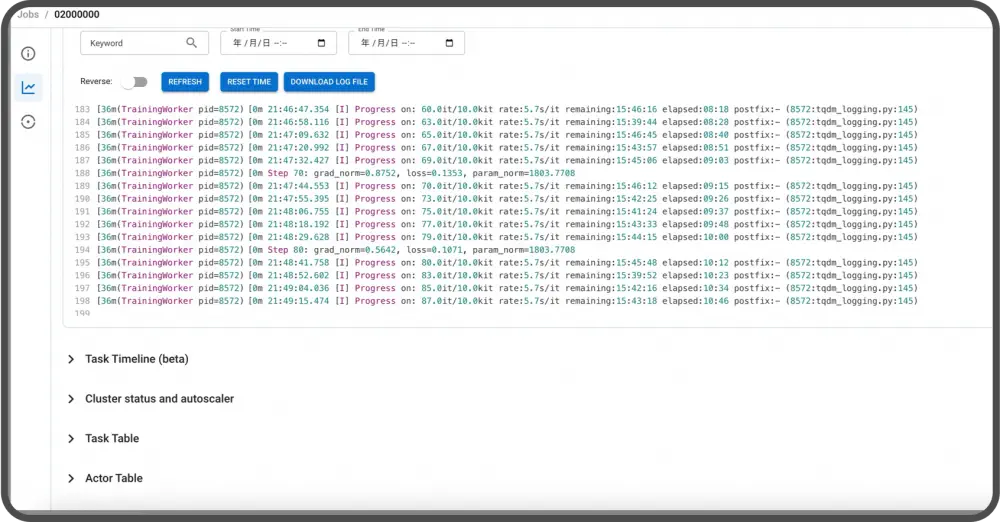
Auf einem leistungsstarken verteilten Trainings-Stack aufgebaut, der elastische Aufgabenplanung und parallele Beschleunigung ermöglicht. Es skaliert dynamisch mit den verfügbaren Ressourcen und erreicht bis zu 90 % GPU-Auslastung.
-
1Wählen Sie
Modell
Architektur -
2Training
Konfiguration
Festlegen -
3Live-Training
Überwachung -
4Parameter
Anpassung -
5Simulation
Tests
Durchführen -
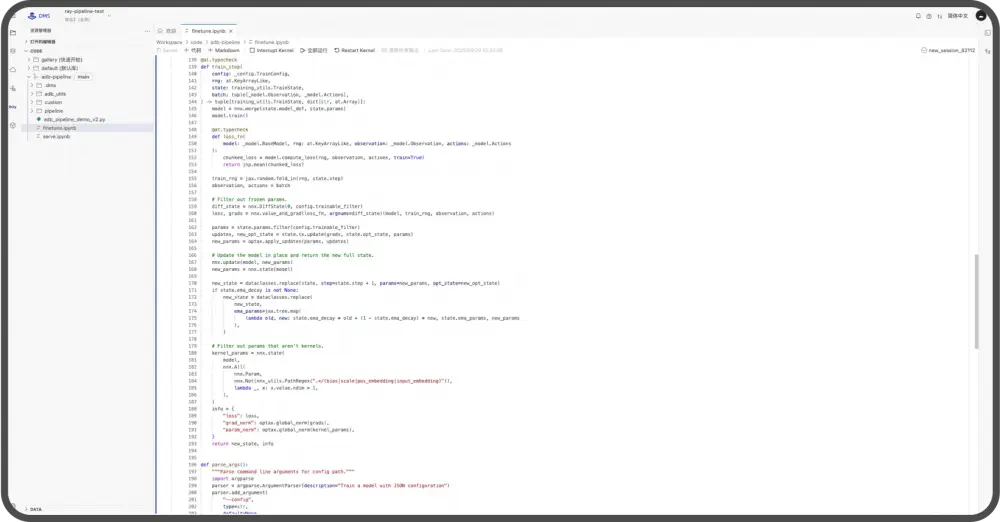
6Modell
Exportieren & Bereitstellen

Anwendungsszenario

Service

Leben

Einzelhandel

Industrie
Ein Offenes World-Model-Action (WMA) Framework
Aktionsgenerierung Geleitet durch
Genaue Vorhersage

Hochpräzises Feedback für
Datensynthese
Enthalten
| • | G1-D-U4 Roboter (feste Basis mit zwei Armen) |
| • | Intelligenter Akku (Schnellverschluss) 9Ah |
| • | Hauptgerät Ladegerät 54V 5A |
| • | Handfernbedienung |
| • | BrainCo fünf-Finger geschickte Hände (Revo 2 Basic Edition; enthält RGB Kamera) x2 |
Der Paketinhalt variiert je nach Konfiguration.
| • | 1260 × 500 × 500 mm |
| • | 1680 × 500 × 500 mm |
| • | Ca. 50kg |
Die angegebenen Werte sind die Gesamtabmessungen bei minimaler und maximaler Säulenhöhe.
| • | BrainCo fünf-Finger geschickte Hände (Revo 2 Basic Edition) |
| • | Reguläre Lenkrollenbasis |
| • | Jetson Orin NX 16GB (100TOPS) |
| • | Kopf HD Binokular (*1) & Handgelenk HD Kamera (*2) |
[1] Die maximale Last des Arms variiert stark bei unterschiedlichen Armverlängerungshaltungen.
[2] Für die Auswahl des Endeffektors kontaktieren Sie bitte unser Vertriebsteam.
[3] Für weitere Informationen lesen Sie bitte das Handbuch zur sekundären Entwicklung.