
Beschreibung
- Unitree Dex3-1 Tactile Hand für Unitree H2 (Rechts)
- Bietet eine dreifingrige, geschickte Hand mit 7 Freiheitsgraden
- Entwickelt für vielseitigen Betrieb
- Mit Hybridkraft-Positionskontrolle
- Liefert sowohl Empfindlichkeit als auch Zuverlässigkeit
Die Unitree Dex3-1 Tactile Hand für die Unitree H2 (Rechts) ist eine leistungssteuerbare, hochgeschickte Roboterhand, die für vielseitigen Betrieb entwickelt wurde. Mit Hybridkraft-Positionskontrolle liefert sie sowohl Empfindlichkeit als auch Zuverlässigkeit und ermöglicht präzise Manipulation von Objekten.

Die Dex3-1 ist eine dreifingrige, geschickte Hand mit 7 Freiheitsgraden und 7 unabhängigen Bewegungsachsen: sechs Mikro-bürstenlose Kraftsteuerungs-Direktantriebs-Gelenke und ein Mikro-bürstenloses Kraftsteuerungs-Zahnradantriebs-Gelenk. Ausgestattet mit 33 taktilen Sensoren bietet sie detailliertes Feedback für fortschrittliche Steuerung. Sie kann mit dem Unitree G1 humanoiden Roboter gekoppelt werden, um eine Vielzahl komplexer Aufgaben auszuführen.
- 1x Unitree Dex3-1 Tactile Hand für Unitree H2 (Rechts)
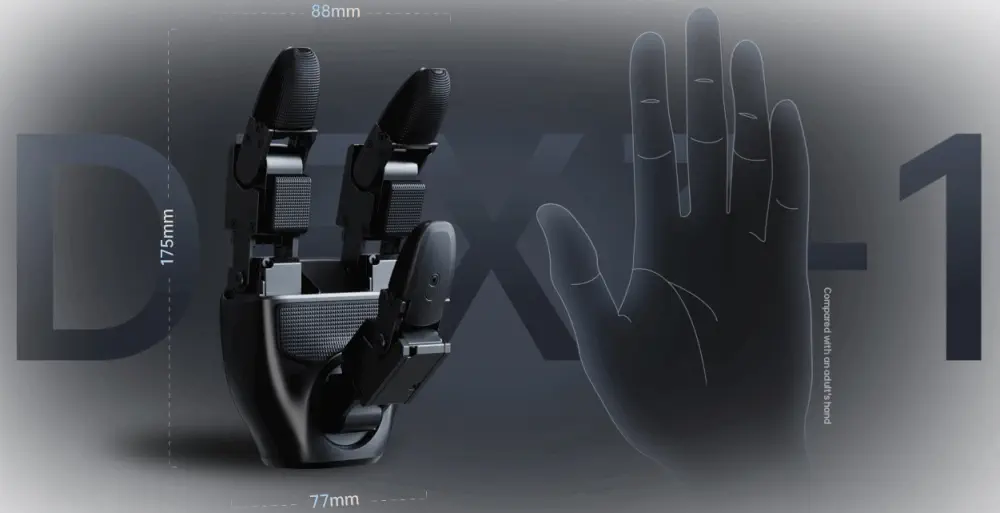
- 88 x 77 x 175 mm (L x B x H)
- Freiheitsgrade
- Daumen 3x
- Zeigefinger 2x
- Mittelfinger 2x
- Übertragungsmechanismus
- 6 Motoren treiben direkt an
- 1 Motorantrieb mit Zahnrädern
- Winkel des Gelenks
- Daumengelenk 0: -60°~60°
- Daumengelenk 1: -35°~60°
- Das Daumengelenk 2: 0 bis 100°
- Zeigefingergelenk 0: 0°~90°
- Zeigefingergelenk 1: 0°~100°
- Mittelfingergelenk 0: 0°~90°
- Mittelfingergelenk 1: 0°~100°
- Fingerspitzen-Wiederholgenauigkeit: ±2 mm
- Betriebsspannung: 12 ~ 58 V
- Stromaufnahme im Ruhezustand: 58 V bei 0,2 A
- Maximalen Strom: 10 A
- Kommunikationsschnittstelle: USB 2.0
- Betriebstemperaturbereich: -20°C ~ 60°C
- Belastungsbedingungen (Handfläche nach unten bei Raumtemperatur, Greifen eines 5 cm runden harten Objekts)
- Das maximale Gewicht beträgt 500 g
- Die maximale Leistung beträgt: 400 W bei 3 s
- Belastungsbedingung (Handfläche nach links bei Raumtemperatur, Greifen eines 5 cm runden harten Objekts)
- Das maximale Gewicht beträgt 500 g
- Die maximale Leistung beträgt: 400 W bei 3 s
- Anzahl der Drucksensoren: 9 (Insgesamt 33 Drucksensoren)
- Array-Auflösung
- 2x2 (Handfläche) 3x
- 2x2 (Einzelner Finger Pad) 3x
- 3x1 (Einzelne Fingerspitze) 3x
- Wahrnehmungsbereich: 10 g-2500 g
- Maximale Akzeptanz (Unbeschädigt): 20 kg
- Kommunikationsrate: 1000 Hz
- Anzahl der Bytes in einem vollständigen Paket
- Sender: 1234 Bytes
- Empfänger: 1270 Bytes
- Perzeptuelles Feedback: Gelenkmodus, Gelenkposition, Gelenkgeschwindigkeit, Gelenkdrehmoment, Gelenktemperatur, Spannung und Strom, Sensor-Druckwert, Sensor-Temperaturwert, imu-Daten
- Steuerungs-Feedback: Gelenkmodus, Gelenkposition, Gelenkgeschwindigkeit, Gelenkdrehmoment, Gelenksteifigkeitskoeffizient, Gelenkdämpfungskoeffizient
- Gewicht: 710 g