



Beschreibung
- 2-Kanal-Selbstoptimierungs-Feedback-Bewegungssteuerung
- Bietet Positions- oder Geschwindigkeitssteuerung mit Quadratur-Encodern oder Potentiometern
- Unterstützung für Endschalter und mechanische Anschläge
- Kann mit analogen Signalen, Funksteuerung, Mikrocontroller oder PC gesteuert werden
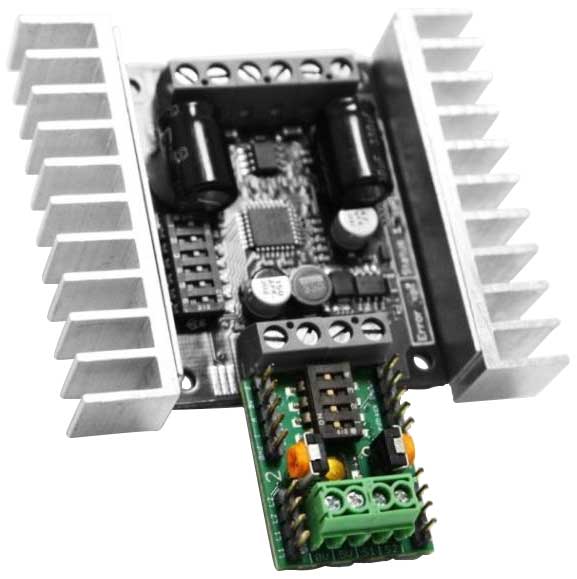
Die Selbstoptimierende Kangaroo X2 Bewegungssteuerung fügt Ihrem Sabertooth- oder SyRen-Motortreiber eine Selbstoptimierungs-Feedback-Bewegungssteuerung hinzu. Sie kann mit Quadratur-Encodern oder Potentiometern verwendet werden, um eine Positions- oder Geschwindigkeitssteuerung bereitzustellen. Sie unterstützt einen oder zwei Feedback-Kanäle. Kangaroo x2 ist der erste Selbstoptimierungscontroller seiner Klasse. Anstelle das System messen, modellieren und berechnen zu müssen, wird der Controller selbst nach ein paar Schaltereinstellungen und Tastendrücken alles herausfinden. In der Zeit, die es dauert, um einen leckeren Snack zu bekommen, können Sie zu einem perfekt abgestimmten System zurückkehren, das bereit ist, Ihre Befehle zu verarbeiten. Anstelle der Vewendung eines Mikrocontroller zur Regelung, arbeitet Kangaroo x2 sowohl mit analogen und Funksteuerungsquellen als auch mit Mikrocontrollern und Computern. Sie können sie verwenden, um einen zwei PS starken R / C-Servo zu bauen. Während des Betriebs können Sie Geschwindigkeiten, Positionen oder kombinierte Befehle geben, wie ''beweg dich um 37 Zoll mit einer Geschwindigkeit von 4 Zoll pro Sekunde.'' Sie können auch Kangaroo x2 Geschwindigkeiten und Positionen zurückmelden lassen, während sie läuft. Ein gemischter Modus ermöglicht unaufhaltsame mobile Roboter mit Differentialantrieb oder Tanksteuerung.
Eigenschaften
- Positions- oder Geschwindigkeitssteuerung
- Quadratur-Encoder-Feedback oder Potentiometer-Feedback
- Analoge, R / C und serielle Eingänge
PDF-Dateien
Kompatibilität
- Sabertooth 2x10
- Sabertooth 2x12
- Sabertooth 2x25
- Sabertooth 2x25 V2
- Sabertooth 2x32
- Sabertooth 2x60
- SyRen 10
- SyRen 25
- SyRen 50