







Beschreibung
- Lynxmotion SES-V2 Robotic Arm (4 DoF) w/ Smart Servos Assembled
- Entwickelt für STEM-Bildung und Hobby-Robotik
- Modulares Design mit Aluminium-, Kohlefaser- und G10-Teilen
- Verwendet Lynxmotion Smart Servo (LSS) Motoren
- Lynxmotion FlowArm LSS Robotic Arm Software - Kostenlos zum Herunterladen
- Unterstützung für Robot Operating System 2 (ROS2)
- Montiert, Kit-Version verfügbar Lynxmotion SES-V2 Roboterarm (4 DoF) mit Smart Servos Set
Hinweis: Die ästhetischen Verkleidungen sind nicht mehr verfügbar.
Der Lynxmotion SES-V2 Robotic Arm (4 DoF) w/ Smart Servos Assembled ist Lynxmotions 6. Generation eines gelenkigen Roboterarms. Diese montierte Version ist als Hobby-/Maßstabsmodell eines industriellen Roboterarms konzipiert und basiert auf den vollständig konfigurierbaren Lynxmotion Smart Servo Motoren und dem Lynxmotion Servo Erector Set (SES v2) modularen Bausystem.
 mit Smart Servos Montiert")
Dieses vielseitige Setup erleichtert die Anpassung und Erweiterung für Anwendungen durch die Verwendung zusätzlicher Halterungen, Elektronik, Sensoren und mehr, und das Hinzufügen zusätzlicher Freiheitsgrade oder das Ändern des Greifers ist unkompliziert.
 mit Smart Servos Montiert")
LSS Gelenkarm mit und ohne Verkleidungen
Hinweis: Die ästhetischen Verkleidungen sind nicht mehr verfügbar.
Obwohl der Arm gut geeignet ist, um auf einem Schreibtisch für Entwicklung und Experimente verwendet zu werden, kann er leicht auf einem mobilen Roboter montiert und mit einem 3S (11,1 V) LiPo-Akku (separat erhältlich) mit XT60-Anschluss betrieben werden. Die enthaltene LSS Adapter Elektronikplatine erleichtert das Anschließen an ein Arduino Shield kompatibles Board, Raspberry Pi, XBee oder ein anderes serielles Gerät.
 mit Smart Servos Montiert")
LSS Gelenkarm auf einer Lyxmotion mobilen Plattform
CAD-Design-Dateien sowie Beispiele mit Arduino und Python sind verfügbar, damit Studenten und Hobbyisten den Arm in ihre Projekte integrieren können. Die grafische Benutzeroberfläche, LSS FlowArm (erstellt mit FlowBotics Studio), macht das Aufzeichnen und Abspielen von Sequenzen mühelos.
 mit Smart Servos Montiert")
LSS FlowArm grafische Benutzeroberfläche
Die Lynxmotion Smart Servo Motoren wurden für gelenkige Roboterverbindungen und Benutzerfreundlichkeit entwickelt und optimiert. Das benutzerdefinierte LSS-Kommunikationsprotokoll ist menschenlesbar, verwendet Vollduplex (dedizierte Tx- und Rx-Leitungen) und wählbare Baudraten. Optimieren Sie die Bewegung, indem Sie die Eigenschaften jedes Servos ändern; alles von der Einstellung einer maximalen Geschwindigkeit oder eines Winkelbereichs bis hin zur Winkelbeschleunigung, Haltefestigkeit und mehr. Jeder Servo kann nach einer Vielzahl von Echtzeitwerten oder konfigurierten Einstellungen abgefragt werden, einschließlich Sensor-Feedback vom Absolut-Encoder (Position, Geschwindigkeit und mehr), Strom, Spannung und Temperatur.
LSS-ROS2-Arms ist ein vollständig Open-Source-ROS-Paket, das die Steuerung eines physischen oder simulierten SES V2 Arms (4DoF oder 5DoF Version) ermöglicht.
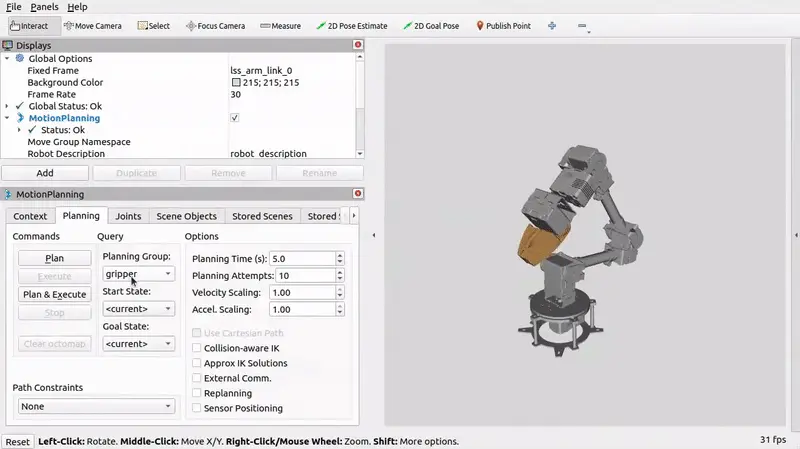
SES-V2 Robotic Arm ROS2 Beispiel
Eigenschaften
- 5x vollständig konfigurierbare modulare Smart Servo Motoren
- Modulare Aluminiumhalterungen, Kohlefaserrohre und mehr
- V-Stil Greifer öffnet sich von 0 bis 180 Grad
- Kompatibel mit Lynxmotion Servo Erector Set Elektronik
- Erstellen Sie Sequenzen mit Handheld-Teach-Modus, Koordinaten, virtuellem Arm
- Eingebaute Sicherheitsfunktionen (Überstrom, Temperatur, Spannung)
- Einfach zu verstehendes und menschenlesbares LSS-Kommunikationsprotokoll
- 3 x LSS ST1 Aktuatoren
- 2 x LSS HT1 Aktuator
- 1 x LSS Adapter (Elektronikschnittstelle)
- 1 x 12 V Wandadapter mit Ein/Aus-Schalter
- 1 x USB-Kabel
- Alle notwendigen Halterungen, Rahmenkomponenten und Hardware
- Schraubendreher (Phillips PH1, PH2)
Größe
- Reichweite: 401.80mm / 15.819 Zoll
- Drehung: 360° / Begrenzt durch das Kabel
 mit Smart Servos Montiert")
- Achsen: 4 Freiheitsgrade + 1 (Greifer)
- Maximale horizontale Reichweite: 401.80mm / 15.819"
- Maximale vertikale Reichweite: 503.12mm / 19.808"
- Nutzlast: 100 g (maximale Reichweite)
- Stromversorgungseingang: 110 V bis 240 V Wechselstrom, 50/60 Hz (US-Typ-A-Stecker)
- Spannungsversorgung: 12 V, 6 A DC mit XT60-Anschluss
- Gewicht: 0,650 kg
Aktoren
| Lage | Art | Statisches Drehmoment | Höchstgeschwindigkeit |
| Base | ST1 | 14 kg-cm | 360 ° / s |
| Schulter | HT1 | 29 kg-cm | 360 ° / s |
| Ellbogen | HT1 | 29 kg-cm | 360 ° / s |
| Handgelenk | ST1 | 14 kg-cm | 360 ° / s |
| Greifer | ST1 | 14 kg-cm | 360 ° / s |
Beachten Sie, dass bei Betrieb mit niedrigeren Spannungen das Drehmoment und die Drehzahl reduziert werden.
Weitere Lynxmotion-Produkte