















Beschreibung
- Leo Rover v1.8 (Montiert)
- Bietet ein 4WD-Outdoor-Robotik-Kit
- Open-Source und auf RaspberryPi aufgebaut
- Entwickelt, um zuverlässig, wasserdicht und erweiterbar zu sein
- Nutzlast: ca. 5 kg
- Video-Streaming und Fahr-UI sofort einsatzbereit
Der Leo Rover v1.8 (Montiert) bietet ein 4WD-Robotik-Kit für den Außenbereich und ist auf Zuverlässigkeit, Wasserdichtigkeit und Erweiterbarkeit ausgelegt.
Es verwendet 4 In-Hub-Gleichstrommotoren mit 73,2: 1-Planetengetriebe und 12 CPR-Encoder und fährt auf 4 Rädern mit 130 mm Durchmesser und Gummireifen mit Schaumstoffeinlage (nicht pneumatisch).
")
Die geschätzte maximale Hindernisgröße beträgt 70 mm bei einer Nennfahrzeit von ca. 4 Stunden. Während des Live-Video-Streamings können Sie sich bis zu einer Entfernung von 100 Metern mit dem Leo Rover verbinden. Seine Kamera hat eine Auflösung von 5 MPx und verwendet ein Fisheye-Objektiv mit einem Sichtfeld von 160 Grad.
")
Standardmäßig wird Leo Rover mit Video-Streaming und einsatzbereiter Benutzeroberfläche ferngesteuert. Es ist nicht autonom, aber es ist autonomiebereit. Die Software basiert auf Ubuntu 20.04 und dem Robot Operating System (ROS), das für die einfache Implementierung von Autonomie- und Halbautonomiefunktionen bekannt ist.
Am einfachsten ist es, eine Lidar- oder Stereovisionskamera hinzuzufügen, um die Rover-Selbstnavigation zu verbessern, und dann Ihre Funktionen darauf aufzubauen. Der Rover selbst hat eine Frontkamera und 4-Rad-Encoder an Bord, sodass Video-Streaming und grundlegende Odometrie sofort einsatzbereit sind.
")
Bitte beachten Sie: Da der Hersteller ständig an der Verbesserung des Designs arbeitet, kann der Rover, den Sie erhalten, etwas anders aussehen und sich verhalten, als in den Videos und Demos gezeigt.
- 1x Leo Rover v1.8 (Montiert)
- 1x Ladegerät
- 1x Sechskant-Schraubendreher zur Montage/Demontage zusätzlicher Module
- Zugriff auf den offiziellen privaten Slack-Community-Kanal für Support, Fehlerbehebung und Hilfe bei Integrationen
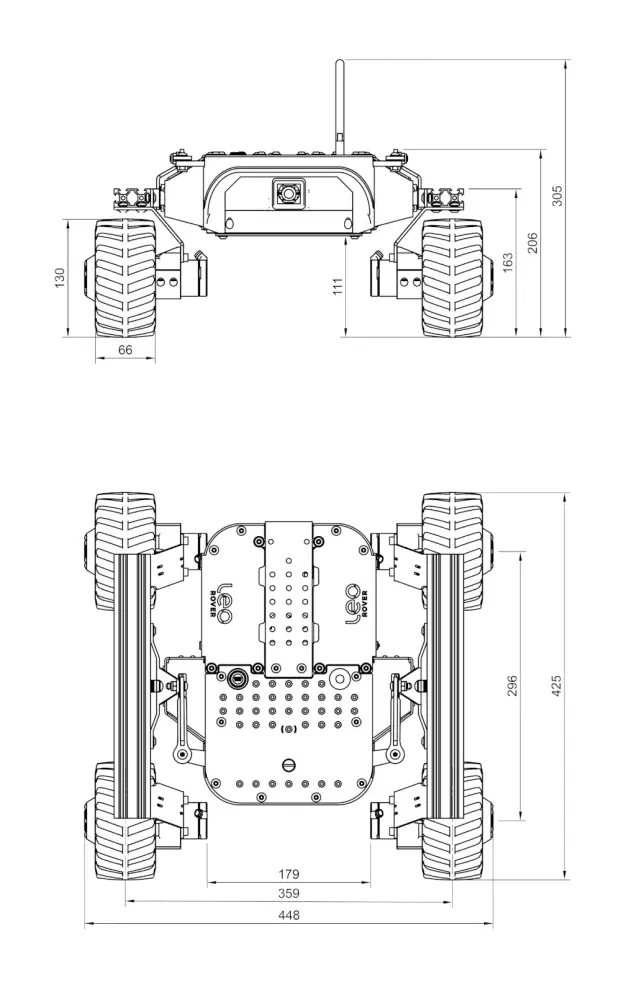
Größe
- Gewicht: 6,5 kg
- Größe: 448 x 425 x 305 mm
- Nutzlast: ca. 5 kg
Größe der oberen Plattformbefestigung
- Größe: 299 x 183 mm
- Lochraster: 18 x 15 mm
- Löcher: 40 x Φ 7 mm + 22 x Φ 5,5 mm
Leistung
- Geschätzte maximale Hindernisgröße: 70 mm
- Schutzart: entspricht IP55 (nicht zertifiziert)
- Laufzeit: Geschätzte 4 Stunden Nennfahrzeit
- Verbindungsreichweite: Bis zu 100 m (mit Live-Videostream)
Räder
- Motoren: 4 x In-Naben-DC-Motor mit 73,2:1 Planetengetriebe und 12 CPR-Encoder
- Raddurchmesser: 130 mm
- Reifenmaterial: Gummi mit Schaumeinlage (nicht pneumatisch)
Batterie
- Spannung: 11,1 V Gleichstrom
- Kapazität: 5.000 mAh
- Typ: Li-Ion mit internem PCM Kurzschluss-, Überstrom- und Überspannungsschutzfunktionen
- max. Strom: 8 A (insgesamt für den ganzen Rover)
Kamera
- Kameraauflösung: 5 MPx
- Linse: Fisheye mit 160 Grad Sichtfeld (IR ungefiltert; Nachtsicht erlaubt)
Netzwerk
- WiFi 2,4 GHz Access Point mit externer Antenne
- WiFi 2,4 GHz + 5 GHz auf internen RPi-Antennen für Konnektivität
Software
- Betriebssystem: LeoOS basierend auf Ubuntu 20.04 + ROS Noetic. ROS2-Unterstützung
- Sofort einsatzbereite Benutzeroberfläche, die sich unter „10.0.0.1“ befindet, wenn das Standard-Leo-Software-Image verwendet wird
- Open-Source-Firmware
Elektronik
- RaspberryPi 4B 2GB (oder höher) als Hauptrechner
- LeoCore als Echtzeit-Mikrocontroller: STM32F4 (@84MHz, 64KB RAM, 256KB Flash)
Geschwindigkeit
- Max. Lineargeschwindigkeit: ca. 0,4 m/s
- Max. Winkelgeschwindigkeit: ca. 60 Grad/s
Verbindungsschnittstellen - Extern verfügbar
- 1x Wasserdichte microUSB-Buchse
- 1x Antenne RP-SMA Stecker
- 1x 3-Pin Weipu SP13 12V Steckdose
Verbindungsschnittstellen - Interne offene Schnittstellen
- RaspberryPi’s: 2x USB, 20x GPIO, RJ45 Ethernet, 1x RPi Display Port, Bluetooth 5.0 mit BLE
Regler
- Sie benötigen ein beliebiges internetfähiges Gerät, um auf die Standard-UI unter „10.0.0.1“ in Ihrem Browser zuzugreifen.
- Geräteanforderungen: Windows/Linux/Android/macOS
- Für eine einfachere Entwicklung wird ROS auf Ihrem Gerät dringend empfohlen.