")
")
")
")
")
")






Zahlungen und Sicherheit
Ihre Zahlungsinformationen werden sicher verarbeitet. Wir speichern keine Kreditkartendaten und haben keinen Zugriff auf Ihre Kreditkarteninformationen.
Beschreibung
- Programmierbare Mecanum-Roboterausrüstung
- Komplette Arduino-Platine eingebaut (ATMega328p)
- Zwei Doppel-H-Brücken zur unabhängigen Ansteuerung von vier Motoren
- Bordspannungsregler (nur eine Batterie erforderlich)
- Kompatibel mit einer Vielzahl von Schilden
- Löten erforderlich
- LiPo-Batterie ist separat erhältlich
Der DFRobotShop Mecanum Rover 2.0 - Arduino-kompatibler Roboter ist ein vielseitiger mobiler Roboter, der auf dem beliebten Arduino Uno-Mikrocontroller basiert. Der Rover verwendet zwei Tamiya Dualmotor-Getriebe mit jeweils einem eigenen Impulsgeber-Paar sowie einer Doppelmotor-Controller-Abschirmung**, um die vier Mecanum-Räder unabhängig voneinander zu steuern. Die DFRobotShop Rover-Platine enthält einen Standard-Arduino Uno (Oberflächenmontage ATMega328), L293B-Motortreiber (verbunden mit Pins 5 bis 8), Spannungsregler und Prototyping-Bereich und verdoppelt sich auch als Teil der mechanischen Struktur des Roboters. Der integrierte Spannungsregler ermöglicht die Stromversorgung der gesamten Platine mit nur 3,7 V bis ~9 V *.

Der DFRobotShop Rover 2.0 Arduino-kompatible Roboter baut auf dem Erfolg der ersten Generation DFRobotShop Rover V2 - Arduino kompatibler, Ketten-Roboter (Basic Kit) auf und integriert ein LiPo-Ladegerät (Ladungen über USB), Lötprototyping-Bereich, XBee-Footprint und mehr. Mecanum omni-direktionalen Rädern ermöglicht dem Rover, sich in die folgenden Richtungen zu bewegen:
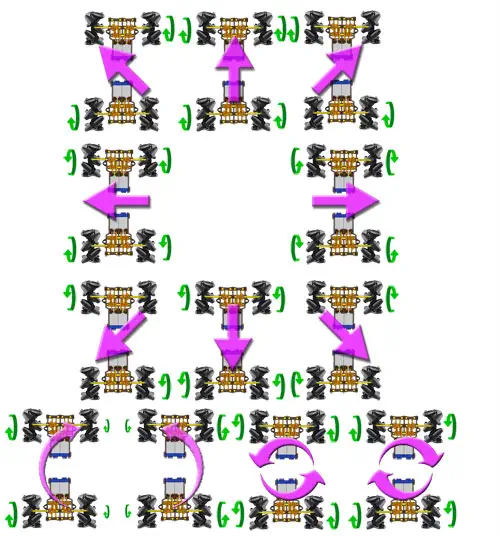
Es ist wichtig zu beachten, dass einige Richtungen aufgrund der beteiligten Kräfte merklich langsamer sind als andere. Zum Beispiel ist vorwärts und rückwärts wesentlich schneller als direkt links und rechts. Rotierendes CW / CCW um den Mittelpunkt dauert länger als bei einem 2-Rad getriebenen Rover.
* Die mit dem Tamiya-Getriebe mitgelieferten Motoren arbeiten mit bis zu 5V. 6V-Motoren sind separat erhältlich.
** Die Rover-Platine von DFRobotShop enthält einen Doppel-Motor-Controller, und die Abschirmung fügt einen Doppel-Controller hinzu, der verschiedene Pins verwendet, wodurch Sie vier DC-Motoren unabhängig voneinander steuern können.
- 1x DFRobotShop Rover V2 Robotersteuerung
- 1x Mecanum Räder 4 Stück (mit Metallnaben) 2x
- 1x linke Halterung
- 1x rechte Halterung
- 1x Dual Motorschutz für Arduino
- 2x Geberpaar für Tamiya Twin Motor Getriebe
- 2x DFRobotShop Rover Hardware
LiPo-Batterie separat erhältlich
PDF-Dateien
- DFRobotShop Rover Handbuch
- DFRobotShop Rover Schema
- Lichtsensor Datenblatt
- DFRobotShop Rover Metallhalter Abmessungen
- DFRobotShop Rover V2 Schematics
Webseite
Forum
ZIP-Dateien
Blog