





Zahlungen und Sicherheit
Ihre Zahlungsinformationen werden sicher verarbeitet. Wir speichern keine Kreditkartendaten und haben keinen Zugriff auf Ihre Kreditkarteninformationen.
Beschreibung
- 3 Räder fahren den mobilen Roboter mit Omni-Rädern
- Kann sich in jede Richtung bewegen
- Programmierbar mit C, C ++
- Einfach zu erweitern
- Kommt vormontiert, nur die Räder sind nicht angebracht
Nexus Robot stellt den 3WD kompakten omnidirektionalen Arduino-kompatiblen mobilen Roboter vor. Dies ist ein mobiler Roboter mit 3 Rädern, der Omni-Räder verwendet. Er ist in der Lage, sich in jede Richtung zu bewegen, indem er die Geschwindigkeit und Richtung jedes Rades ändert, ohne seine Ausrichtung zu ändern. Er beinhaltet Mikrocontroller, IO-Erweiterungskarte, Gleichstrommotor mit Encoder, IR und Ultraschallsensoren. Durch vorgebohrte Schraublöchern lässt er sich leicht verlängern.

Eigenschaften:
- 3 WD
- Omni Rad
- Kompakte Größe
- Aluminiumlegierung
- Einfach zu erweitern
- Inklusive Ultraschallsensor
- Gleichstrommotor mit Encoder
- Open Source
- Mit Arduino-Mikrocontroller
- Programmierbar mit C, C ++
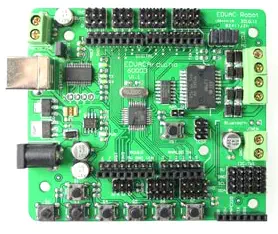
Arduino 328 Mikrocontroller-Platine
Eine Mikrocontrollerplatine, basierend auf dem Arduino 168. Sie hat 14 digitale Eingangs- / Ausgangspins (davon 6 können als PWM-Ausgänge verwendet werden), 8 analoge Eingänge, ein 16 MHz Quarzoszillator, ein USB-Anschluss, eine Steckdose, ein ICSP-Header und eine Reset-Schaltfläche. Sie enthält alles, was benötigt wird, um den Mikrocontroller zu unterstützen. Schließen Sie sie einfach über ein USB-Kabel an einen Computer an oder versorgen Sie sie mit einem AC-zu-DC-Wandler oder einer Batterie an, um loszulegen.
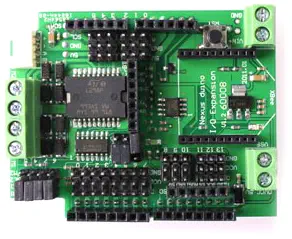
Arduino-E / A-Erweiterung
Nexus Robot bietet die ultimative funktionale Erweiterung für die Arduino IO-Erweiterung V1.2 und ermöglicht Ihnen den einfachen Anschluss von Geräten wie Sensoren, Servos und RS485-Geräten. Diese Sensor-Erweiterungsplatine ist in der Lage, eine Reihe von häufig verwendeten Sensoren einfach anzuschließen.
- 100 mm Rundrad X 3
- Gleichstrommotor mit Encoder X 3
- Ultraschallsensor X 3
- Mikrocontroller X 1
- E / A-Erweiterungskarte X 1
PDF-Dateien
- Datenblatt
- Broschüre
- Omni-Rad Einführung
- Arduino-E / A-Erweiterung
- Arduino-Mikrocontroller-Platine
- Motorzeichnung
ZIP-Dateien:
Chassis:
- Form: Kreis
- Max Breite: 305 mm
- Höhe: 126 mm
- Fahrgestellhöhe: 19 mm
- Radius: 152 mm
- Gekoppelter Modus: Verdichtung
- Material: Aluminiumlegierung
- Farbe: Gelb, Schwarz
- Geschwindigkeit: 0,6 m/s
- Kletterkapazität: 20º
- Belastbarkeit: 15 kg
- PC104 kompatibel: Ja
Rad:
- Typ: 90º Omni Rad
- Durchmesser: 100 mm oder 123 mm
- Dicke: 38 mm
- Material: Nylon oder Aluminiumlegierung
- Belastbarkeit: 15 kg
- Material: Gummi oder Nylon
- Durchmesser der Rolle: 19 mm
- Länge der Rolle: 19 mm
- Gekoppelter Modus: Messingrohr oder Lager
Motor:
- Typ: Faulhaber12 V Gleichstrom Coreless Motor
- Leistung: 17 W
- RPM: 120 U / min
- Durchmesser: 30 mm
- Länge: 42 mm
- Gesamtlänge: 85 mm
- Durchmesser der Welle: 6 mm
- Länge der Welle: 35 mm
- Leerlaufstrom: 75 mA
- Laststrom: 1400 mA
- Getriebeübersetzung: 64:1
Kodierer:
- Typ: Optisch
- Geberphase: AB
- Encoder-Auflösung: 12 CPR
Mikrocontroller:
- ICSP-Header für direkten Programmdownload
- Serielle Schnittstelle TTL-Pegel
- Unterstützung von AREF
- Unterstützung von männlichen und weiblichen Stiftleisten
- Integrierte Buchsen für APC220 RF Module
- Fünf IIC-Schnittstellen-Pin-Sets
- Zwei-Wege-Motorantrieb mit maximalem Strom 2 A