















Description
- Leo Rover v1.8 (Gemonteerd)
- Beschikt over een 4WD outdoor robotica kit
- Open-source en gebouwd op RaspberryPi
- Ontworpen om betrouwbaar, waterdicht en uitbreidbaar te zijn
- Laadvermogen: ca. 5 kg
- Kant-en-klare videostreaming en rijdende gebruikersinterface
De Leo Rover v1.8 (Gemonteerd) is voorzien van een 4WD-roboticaset voor buiten en is ontworpen om betrouwbaar, waterdicht en uitbreidbaar te zijn.
Het maakt gebruik van 4 in-hub DC-motoren met 73.2:1 planetaire versnellingsbak en 12 CPR-encoder en drijft op 4 wielen met een diameter van 130 mm en rubberen banden met schuimrubberen inzetstuk (niet-pneumatisch).
")
De geschatte maximale hindernisgrootte is 70 mm bij ongeveer 4 uur nominaal rijden. Tijdens live videostreaming kun je verbinding maken met de Leo Rover tot een afstand van 100 meter. De camera heeft een resolutie van 5 MPx en maakt gebruik van een Fisheye-lens met een gezichtsveld van 160 graden.
")
Leo Rover wordt standaard op afstand bestuurd met videostreaming en UI ready-to-go. Het is niet autonoom, maar het is klaar voor autonomie. De software is gebaseerd op Ubuntu 20.04 en Robot Operating System (ROS), dat bekend staat om het gemak van autonomie en de implementatie van semi-autonomie-functies.
De eenvoudigste manier is om een lidar- of stereovision-camera toe te voegen om de zelfnavigatie van de Rover te verbeteren en daar bovenop je functies te bouwen. De Rover zelf heeft één camera aan de voorkant en 4 wiel-encoders aan boord, dus het biedt out-of-the-box videostreaming en basis-odometrie.
")
Let op: aangezien de fabrikant voortdurend werkt aan het verbeteren van het ontwerp, kan de Rover die u ontvangt er weinig anders uitzien en zich gedragen dan in de video's en demo's.
- 1x Leo Rover v1.8 (Gemonteerd)
- 1x Acculader
- 1x zeskant schroevendraaier om extra modules te monteren/demonteren
- Toegang tot het officiële Slack-community kanaal voor ondersteuning, probleemoplossing en hulp bij integraties
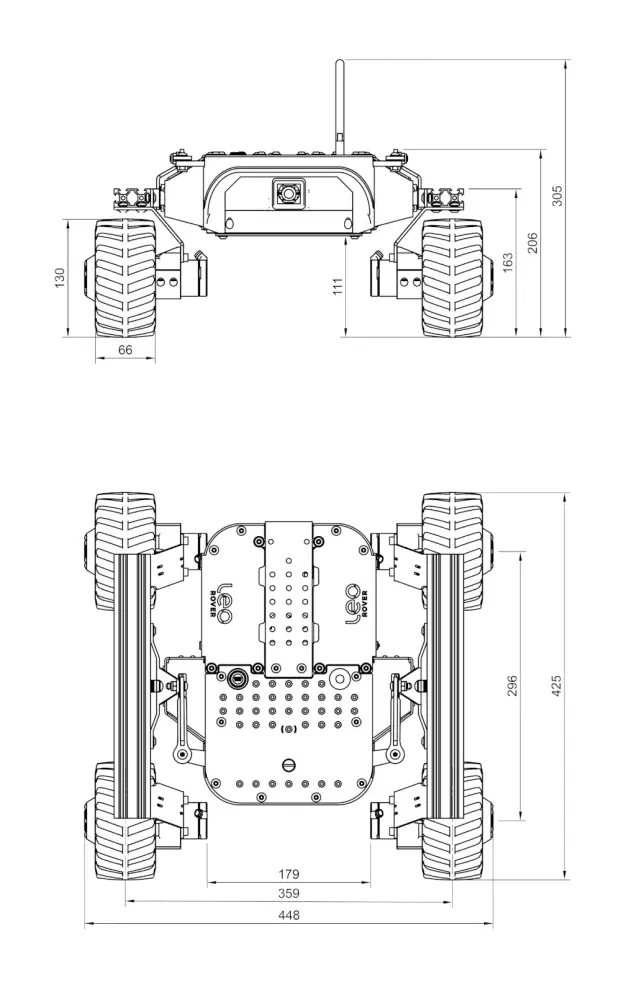
Maat
- Gewicht: 6,5 kg
- Afmeting: 448 x 425 x 305 mm
- Laadvermogen: ca. 5 kg
Bovenste platform montage Maat:
- Afmeting: 299 x 183 mm
- Gatenrooster: 18 x 15 mm
- Gaten: 40 x Φ 7 mm + 22 x Φ 5,5 mm
Uitvoering
- Geschatte maximale obstakelgrootte: 70 mm
- Beschermingsgraad: voldoet aan IP55 (niet gecertificeerd)
- Looptijd: geschatte 4 uur nominaal rijden
- Aansluitbereik: tot 100 m (met live videostream)
Wielen
- Motoren: 4 x in-hub DC-motor met 73.2:1 planetaire versnellingsbak en 12 CPR-encoder
- Wieldiameter: 130 mm
- Bandenmateriaal: rubber met schuimrubberen inzet (niet pneumatisch)
Accu
- Spanning: 11,1 V gelijkstroom
- Capaciteit: 5000 mAh
- Type: Li-Ion met interne PCM Beveiliging tegen kortsluiting, overstroom en overbelasting
- Maximaal stroom: 8 A (totaal voor de hele Rover)
Camera
- Cameraresolutie: 5 MPx
- Lens: Fisheye met een gezichtsveld van 160 graden (IR niet-gefilterd; nachtzicht toegestaan)
Netwerk
- WiFi 2,4 GHz-toegangspunt met externe antenne
- WiFi 2,4 GHz + 5 GHz op interne RPi-antennes voor connectiviteit
Software
- Besturingssysteem: Ubuntu 20.04 + Robotbesturingssysteem
- Kant-en-klare gebruikersinterface onder '10.0.0.1' bij gebruik van standaard Leo Software Image
- Open source-firmware
Elektronica
- RaspberryPi 4B 2GB (of hoger) als hoofdcomputer
- LeoCore als realtime microcontroller: STM32F4 (@84MHz, 64KB RAM, 256KB Flash)
Snelheid
- Maximaal lineaire snelheid: ca. 0,4 m/s
- Maximaal hoeksnelheid: ca. 60 graden/s
Aansluitinterfaces - Extern verkrijgbaar
- 1x waterdichte microUSB-aansluiting
- 1x antenne RP-SMA mannelijke aansluiting
- 1x 3-pins Weipu SP13 12V stopcontact
Verbindingsinterfaces - Interne open interfaces
- RaspberryPi's: 2x USB, 20x GPIO, RJ45 Ethernet, 1x RPi displayport, Bluetooth 5.0 met BLE
Controller
- U hebt elk apparaat met internet nodig om toegang te krijgen tot de standaardgebruikersinterface onder '10.0.0.1' in uw browser.
- Apparaat vereisten: Windows/Linux/Android/macOS
- Voor eenvoudigere ontwikkeling wordt ROS op uw apparaat ten zeerste aanbevolen.