")
")
")
")
")





Betalingen en veiligheid
Uw betalingsgegevens worden veilig verwerkt. We slaan geen creditcardgegevens op en hebben ook geen toegang tot uw creditcardgegevens.
Description
- Programmeerbaar door Mecanum aangedreven robotkit
- Volledig ingebouwd Arduino-bord (ATMega328p)
- Twee dubbele H-bruggen voor onafhankelijke aansturing van vier motoren
- Spanningsregelaar aan boord (slechts één batterij nodig)
- Compatibel met verschillende soorten schilden
- Solderen is vereist
- LiPo-batterij wordt apart verkocht
De DFRobotShop Mecanum Rover 2.0 - Arduino Compatibele Robot is een veelzijdige mobiele robot gebaseerd op de populaire Arduino Uno microcontroller. De Rover gebruikt twee Tamiya Twin-Motor Versnellingsbak , elk met hun eigen paar encoders, evenals een schild met dubbele motorbesturing ** om de vier Mecanum-wielen onafhankelijk te besturen. De DFRobotShop Rover PCB bevat een standaard Arduino Uno (Surface Mount ATMega328), L293B-motorstuurprogramma (aangesloten op pennen 5 tot 8), spanningsregelaar en prototyperingsgebied en verdubbelt ook als onderdeel van de mechanische structuur van de robot. Met de ingebouwde spanningsregelaar kan het hele bord worden gevoed met zo weinig als 3.7V tot ~ 9V *.

De DFRobotShop Rover 2.0 Arduino-compatibele robot bouwt voort op het succes van de eerste generatie DFRobotShop Rover V2 - Arduino Compatibele Robottank (Basisset) en integreert een LiPo-oplader (opladen via USB), soldeer prototypegebied, XBee-voetafdruk en meer. Met Mecanum omni-directionele wielen kan de Rover in de volgende richtingen bewegen:
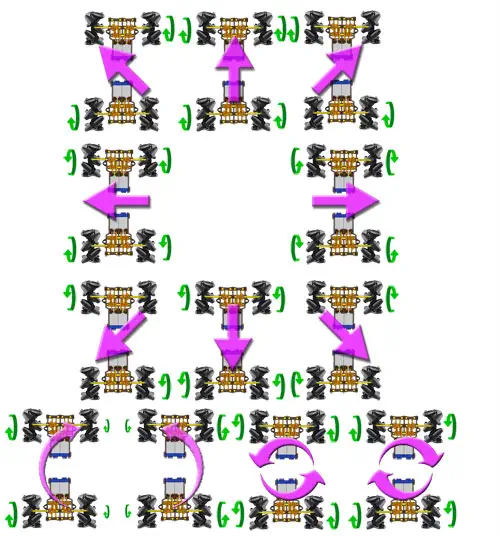
Het is belangrijk op te merken dat als gevolg van de betrokken krachten sommige richtingen merkbaar langzamer zijn dan andere. Als een voorbeeld, vooruit en achteruit is aanzienlijk sneller dan direct links en rechts. Het draaien van CW / CCW over het middelpunt duurt langer dan bij een 2WD rover.
* Motoren die bij de Tamiya-versnellingsbak worden geleverd, werken op maximaal 5V. 6V-motoren zijn afzonderlijk verkrijgbaar.
** De DFRobotShop Rover PCB heeft een tweevoudige motorbesturing en het schild voegt een dubbele controller toe die verschillende pins gebruikt, waardoor u vier DC-motoren onafhankelijk van elkaar kunt besturen.
- 1x DFRobotShop Rover V2-robotcontroller
- 1x Mecanum Wiel 4 Pak (met Metalen Naven) 2x Tamiya Twin-Motor Versnellingsbak
- 1x linker beugel
- 1x Rechter beugel
- 1x Dual Motor Shield voor Arduino
- 2x Encoder-paar voor Tamiya Twin Motor Gearbox
- 2x DFRobotShop Rover hardware
LiPo-batterij wordt apart verkocht
PDF-bestanden
- DFRobotShop Rover-handleiding
- DFRobotShop Rover Schematisch
- Gegevensblad van de lichtsensor
- DFRobotShop Rover Metal Bracket Dimensions
- DFRobotShop Rover V2 Schema's
Website
Forum
ZIP-bestanden
blog