



Description
- Zes-assige geavanceerde robotische manipulator (ARM) met open besturingsinterface
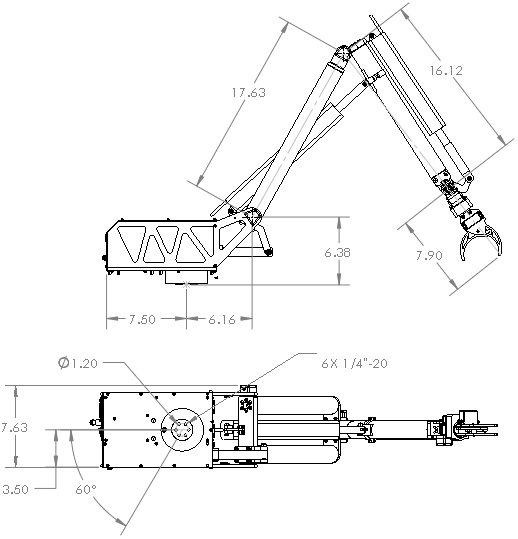
- 2 meter bereik diameter en mogelijkheid om 4.5kg (10 pond) te hijsen
- Houdt positie op lagere 4 verbindingen terwijl de stroom is uitgeschakeld
- CNC gevaardigde aluminium en koolstofvezel constructie
De Geavanceerde Robotmanipulator (ARM 3.0) - Open loop is een robotarm met zes assen en een open besturingsinterface voor eenvoudige implementatie in andere projecten. Elke verbinding wordt bevolen om via RC PWM-signalen te positioneren. Koolstof vezel segmenten en CNC gevaardigd vliegtuigkwaliteit aluminium maken de ARM 3.0 tot een sterke eenheid. Met een reikwijdte van meer dan 2 meter en een hefvermogen van 4.5kg (10 pond) is het een zeer capabele ARM-waarde. De ARM 3.0 verbetert de ARM 2.0 met betere positiesensoren, sterkere lineaire actuators en krachtigere motorcontrollers.

Deze arm van 6 vrijheidsgraden maakt gebruik van lineaire aandrijvers en roterende servo's om een operatiekoppel van meer dan 7 ft in diameter te bieden. Afgedichte kogellagers zorgen voor nauwkeurige bewegingen bij elke verbinding. De onderste 4 verbindingen maken gebruik van absolute encoders voor nauwkeurige, lineaire besturing. Typische stroomafname bij volledige capaciteit is ongeveer 7 ampere. Rotatiesnelheid van basisverbinding is 60 graden / seconde. De pols draait 240 graden in 2.3 seconden. De grijper beweegt in minder dan 1 seconde van volledig open naar volledig gesloten. Omgekeerde stroombeveiliging en overmatige stroombeveiliging is ingebouwd in het apparaat. Een aan / uit-schakelaar met groene LED-statusindicatie "on" bevindt zich op de elektronicabehuizing.

Open-Loop Snelheidsregeling
Alle verbindingen in deze versie van de ARM werken in open-lus-snelheidsmodus. Deze ARM is het meest vriendelijk bij gebruik van een joystick of radiobesturingseenheid, zodat een menselijke operator de ARM rechtstreeks kan besturen. Wanneer verbonden met een radio of joystick, zal deze ARM in positie blijven wanneer de joystick gecentreerd is en zal beginnen te bewegen als de operator de joystick vanuit het midden beweegt. Hoe meer de joystick vanuit het midden wordt verplaatst, hoe sneller de ARM zal bewegen. Als de joystick in de andere richting wordt bewogen, zal de ARM de richtingen omkeren. Deze versie van de ARM kan out-of-the-box worden uitgevoerd door 12VDC-voeding en elke standaard RC-radio op de ingangsconnector aan te sluiten.

Kenmerken
- Absolute, lineaire feedback van elke verbinding
- Eindschakelaars aan bewegingsuiteinden van lineaire actuators
- Sterke aluminium behuizing bevat besturingselektronica
- DB-25-connector voor voeding en signaalingang
- Aan /Uit-schakelaar op basis
- Koolstofvezel segmenten
- CNC gefreesde aluminium constructie
- Verenigbaar met conventionele radiobesturingsunits
- Power-indicator LED
- 12VDC vermogen
- Omgekeerde verbinding beveiligd
Toepassingen
- Robot controleert onderzoeksprojecten
- Universitaire technische laboratoria
- Manipulator voor onbemande voertuigen op de grond
- Robotwedstrijden
- Testen van producten in gevaarlijke omgevingen
PDF bestand
- Bereik envelop: 86.6"(2.2 m) diameter
- Hefcapaciteit: 10 lbs (4.5 kg) bij volledige extensie
- Vrijheidsgraden: 6
- Interface: RC PWM
- Gewicht: 20.4 lbs (9.2 kg)
- Ingang: 12VDC, 7.5 A piek