
Description
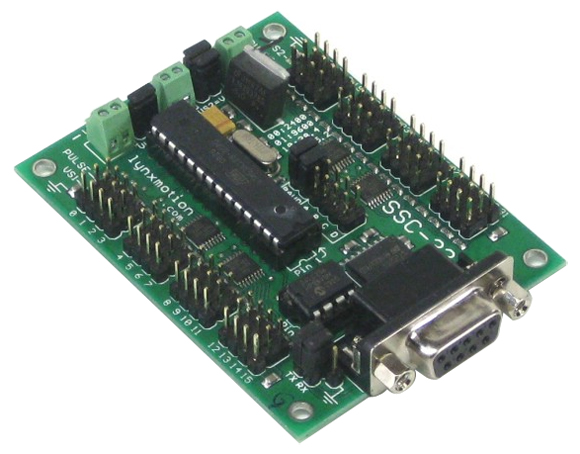
- Contrôleur de Servomoteurs SSC-32 Lynxmotion
- Contrôle jusqu'à 32 servomoteurs
- Livré pré-assemblé
- Interface série (TTL ou RS-232)
- Communication bidirectionnelle avec les commandes de requête
Ce produit est abandonné et remplacé par Contrôleur de Servomoteurs USB SSC-32U Lynxmotion une version USB améliorée.
Le Contrôleur de Servomoteurs SSC-32 Lynxmotion est un petit servo-contrôleur pré-assemblé avec de grandes fonctionnalités. Il a une haute résolution (1 uS) pour un positionnement précis et des mouvements extrêmement fluides. La plage est de 0,50 mS à 2,50 mS pour une plage d'environ 180 °. La commande de mouvement peut être une réponse immédiate, une vitesse contrôlée, un mouvement chronométré ou une combinaison. Un «mouvement de groupe» unique permet à n'importe quelle combinaison de servos de commencer et de terminer le mouvement en même temps, même si les servos doivent parcourir des distances différentes. Il s'agit d'une fonctionnalité très puissante pour créer des allures de marche complexes pour les robots de marche multi-servos. La position ou le mouvement du servo peut être interrogé pour fournir un retour à l'ordinateur hôte.
Il y a même un séquenceur hexapode à 12 servos intégré. Cela permet un contrôle complet de tous les aspects de la démarche du trépied alternatif simplement en transférant quelques valeurs à partir du contrôleur hôte. N'importe quelle sortie peut être utilisée comme sortie de niveau TTL. Il y a 4 entrées numériques statiques ou verrouillées, vous n'avez donc pas à vous soucier de manquer un court événement. Ils peuvent également être utilisés comme entrées analogiques. Il existe trois borniers pour alimenter les options. L'entrée DB9 a de vrais niveaux RS-232 pour une utilisation avec un PC.
Fonctionnalités:
• 32 canaux de servocommande de résolution 1uS
• Communication bidirectionnelle avec les commandes de requête
• Mouvements synchronisés ou «groupe»
• 12 Servo Hexapod Gait Sequencer intégrés
• Émulation MiniSSC-II, comme en avoir 4
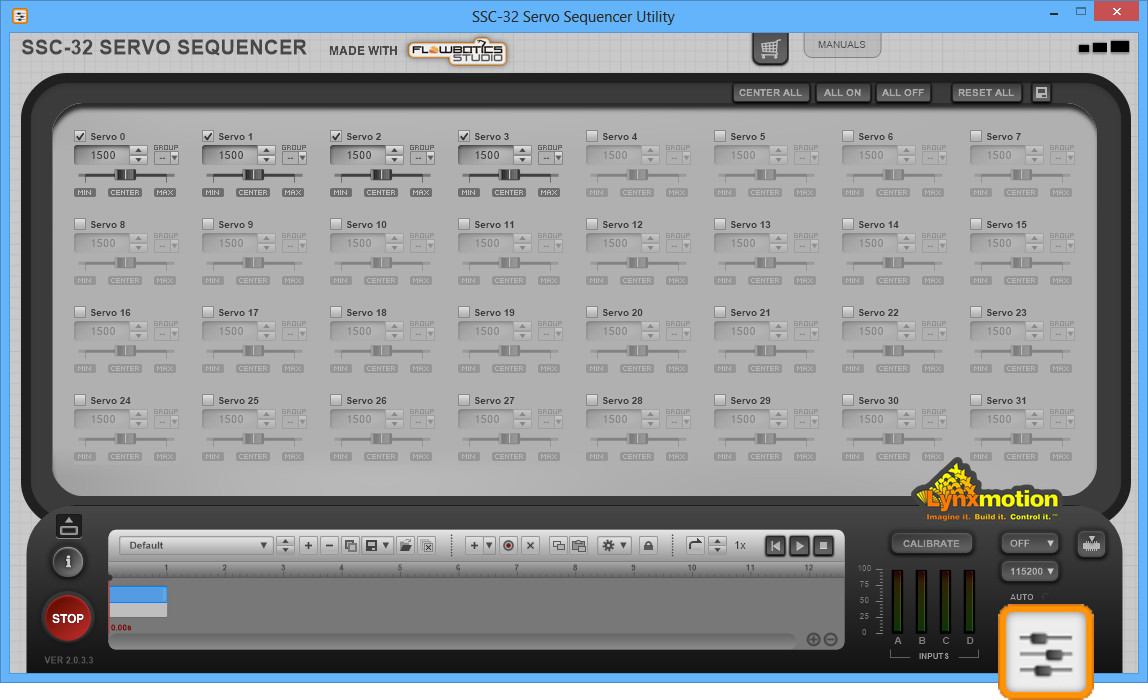
Utilitaire Contrôleur de Servomoteurs SSC-32 Lynxmotion (créé à l'aide de FlowBotics Studio)
La carte de contrôleur de servomoteur Lynxmotion SSC-32 peut être facilement contrôlée avec le nouvel utilitaire de séquenceur de servomoteur SSC-32 . Il est disponible sous la forme d'un utilitaire téléchargeable gratuit qui facilite l'expérimentation de la robotique et de l'animatronique. Il peut être trouvé dans la section Liens utiles.
Cet utilitaire est un exemple du type de programme qui peut être construit à l'aide de Lynxmotion FlowBotics Studio Logiciel de Programmation Graphique - Téléchargement Gratuit , qui inclut ce programme en tant que projet de démonstration open source. Le programme SSC-32 Servo Sequencer Utility vous permet de déplacer facilement les servomoteurs, de calibrer leur position, de stocker et de lire les séquences de mouvement, de mettre à niveau le micrologiciel SSC-32 et plus encore.
Fichiers PDF
• Guide d'utilisation
• Séquenceur à usage général SSC-32
Fichiers ZIP
• Micrologiciel SSC-32 pour puce Atmega168 (v2)
• Micrologiciel SSC-32 pour puce Atmega8 (v1)
Utilitaire GRATUIT
• SSC-32 Utilitaire de Séquenceur de Servomoteur - Téléchargement Gratuit (créé à l'aide de FlowBotics Studio)
Site Internet
• Guides d'utilisation et d'assemblage Lynxmotion
• Article de blog: Guide des options d'alimentation pour les contrôleurs Lynxmotion
Ces spécifications concernent la version 2.01XE du firmware:
• Microcontrôleur: Atmel ATMEGA168-20PU
• EEPROM: 24LC32P (requis pour 2.01GP)
• Vitesse: 14,75 MHz
• Séquenceur interne: 12 hexapodes servo (trépied alternatif)
• Entrée série: True RS-232 ou TTL, 2400, 9600, 38,4 k, 115,2 k, N81
• Sorties: 32 (servo ou TTL)
• Entrées: 4 (statiques ou verrouillables, analogiques ou numériques)
• Exigences actuelles: 31mA
• Interface PC: DB9F
• Interface du microcontrôleur: messages d'en-tête
• Contrôle des servos: jusqu'à 32 servos se branchent directement
• Type de servo pris en charge: Futaba ou Hitec
• Plage de déplacement du servo: 180 °
• Résolution servo: 1uS, .09 °
• Résolution de vitesse servo: 1uS / Second
• Contrôle de mouvement servo: immédiat, temporisé, rapide ou synchronisé.
• Taille de la carte PC: 3,0 "x 2,3"
• Courant de crête VS: max 15 ampères par côté
• Courant continu VS = max 3-5 ampères par côté recommandé.