









Incluido en este paquete
- 1 X RB-Unt-237 - Pinza Unitree Dex1-1 V1 para Unitree H2 (Izquierda)
- 1 X RB-Unt-240 - Pinza Unitree Dex1-1 V1 para Unitree H2 (Derecha)
Descripción
- Mano Unitree Dex1-1 V1 para Unitree H2 (Par)
- Para Robot Humanoide Unitree H2
La Mano Unitree Dex1-1 V1 para Unitree H2 (Par) ofrece una pinza de precisión diseñada específicamente para el robot humanoide Unitree H2. Como la versión estándar de la serie Dex1-1, esta unidad proporciona un rendimiento confiable y versatilidad para una amplia gama de aplicaciones robóticas. Es ideal para tareas que requieren agarre básico, manipulación y desarrollo experimental de robótica.
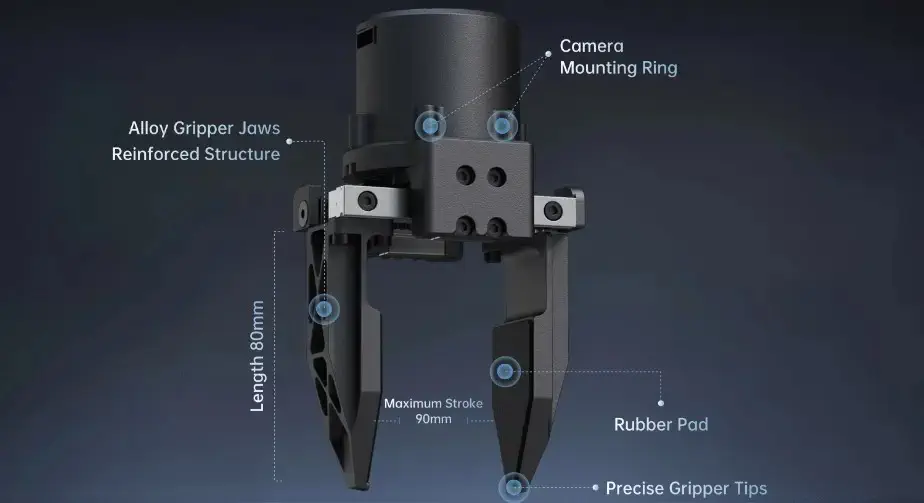
Este paquete incluye una pinza Dex1-1, un soporte de montaje para cámara D405 (cámara no incluida) para una integración flexible de sensores, una placa de conversión de 485 a USB, y todos los cables y accesorios necesarios. Estas manos también están equipadas con interfaces robóticas amigables para el desarrollo, permitiendo el desarrollo secundario y la personalización para proyectos de investigación o educativos.
- 1x Mano Unitree Dex1-1 V1 para Unitree H2 (Derecha)
- 1x Mano Unitree Dex1-1 V1 para Unitree H2 (Izquierda)
Nota: Esta es una pieza de reparación autodesarrollada y no puede comprarse por separado; debe ordenarse junto con una unidad H2.

- 143 x 78 x 67 mm (L x A x Al)
- Longitud de la mandíbula: 80 mm
- Recorrido: 90 mm
- Fuerza de agarre (ajustable): 5~120 N
- Velocidad (ajustable): 50~375 mm/s
- Resolución de posición (punta del dedo): 0,1 mm
- Carga de agarre (ajuste de forma): 20 kg
- Carga de agarre (fricción): 5 kg
- Tiempo de cierre más corto a recorrido completo: 0,24 s
- Protocolo de comunicación: 485 de alta velocidad
- Tasa de baudios de comunicación: 6 Mbps
- Frecuencia de control de comunicación: 1000 Hz
- Voltaje de operación: 24 V ~ 64 V (24 / 48 V DC recomendado)
- Corriente estática: 0,03 A
- Corriente de línea máxima: 3,5 A
- Par máximo del motor: 5 N.m
- Velocidad máxima del motor: 27 rad/s (con fuente de alimentación de 64 V)
- Entorno de operación recomendado: -20 °C ~ 60 °C
- Relación de reducción del motor: 1:25
- Resolución del codificador del motor: 15 bits
- Tipo de codificador del motor: Codificador absoluto
- Retroalimentación del estado del motor: Ángulo, Velocidad angular, Par, Temperatura
- Instrucción de control del motor: Ángulo, Velocidad angular, Par, Rigidez, Amortiguación