







Descripción
- Lynxmotion SES-V2 Robotic Arm (4 DoF) c/ Smart Servos Assembled
- Diseñado para la educación STEM y robótica de hobby
- Diseño modular con partes de aluminio, fibra de carbono y G10
- Utiliza motores Lynxmotion Smart Servo (LSS)
- Software Lynxmotion FlowArm LSS para Brazo Robótico - Gratis para Descargar
- Soporte para Robot Operating System 2 (ROS2)
- Ensamblado, versión kit disponible Brazo Robótico Lynxmotion SES-V2 (4 DoF) c/ Kit de Servos Inteligentes
Nota: Las carcasas estéticas ya no están disponibles.
El Lynxmotion SES-V2 Robotic Arm (4 DoF) c/ Smart Servos Assembled es el brazo robótico articulado de sexta generación de Lynxmotion. Esta versión ensamblada está destinada como una versión de hobby / escala de un brazo robótico industrial y está diseñada en torno a los motores Lynxmotion Smart Servo completamente configurables y el sistema de construcción modular Lynxmotion Servo Erector Set (SES v2).
 c/ Servos Inteligentes Instalados")
Esta configuración versátil facilita la personalización y expansión para aplicaciones mediante el uso de soportes adicionales, electrónica, sensores y más, y agregar grados de libertad adicionales o cambiar la pinza es sencillo.
 c/ Servos Inteligentes Instalados")
Brazo Articulado LSS con y sin carcasas
Nota: Las carcasas estéticas ya no están disponibles.
Aunque es adecuado para su uso en un escritorio para desarrollo y experimentación, el brazo puede montarse fácilmente en un robot móvil y alimentarse con una batería LiPo de 3S (11,1 V) (vendida por separado) con conector XT60. La placa electrónica LSS Adapter incluida facilita la conexión a una placa compatible con shield de Arduino, Raspberry Pi, XBee u otro dispositivo serial.
 c/ Servos Inteligentes Instalados")
Brazo Articulado LSS en una plataforma móvil de Lynxmotion
Los archivos de diseño CAD, así como ejemplos utilizando Arduino y Python están disponibles para que estudiantes y aficionados puedan integrar el brazo en sus proyectos. La interfaz gráfica de usuario, LSS FlowArm (creada usando FlowBotics Studio) hace que grabar y reproducir secuencias sea sencillo.
 c/ Servos Inteligentes Instalados")
Interfaz gráfica de usuario LSS FlowArm
Los motores Lynxmotion Smart Servo fueron diseñados y optimizados para articulaciones robóticas articuladas y facilidad de uso. El protocolo de comunicación LSS personalizado es legible por humanos, utiliza dúplex completo (líneas dedicadas Tx y Rx) y tasas de baudios seleccionables. Optimice el movimiento cambiando las propiedades de cada servo; desde establecer una velocidad máxima o rango angular hasta la aceleración angular, rigidez de retención y más. Cada servo puede ser consultado para una amplia variedad de valores en tiempo real o configuraciones, incluyendo retroalimentación de sensores del codificador absoluto (posición, velocidad y más), corriente, voltaje y temperatura.
LSS-ROS2-Arms es un paquete ROS completamente de código abierto que permite controlar un brazo SES V2 físico o simulado (versión 4DoF o 5DoF).
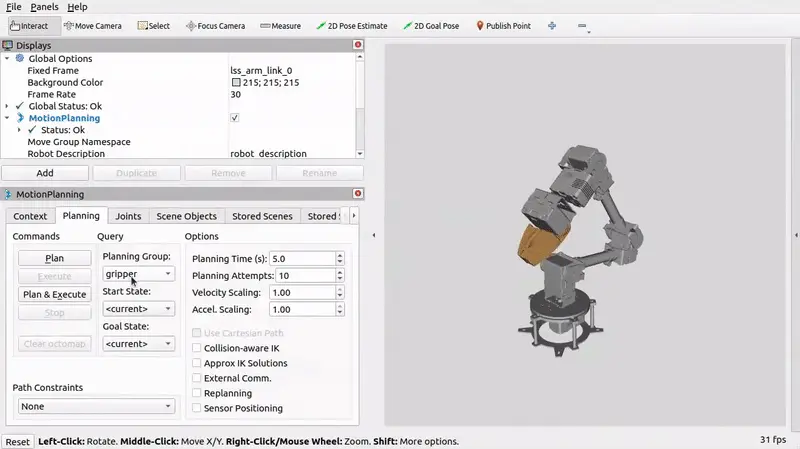
Ejemplo de Brazo Robótico SES-V2 ROS2
Incluye
- 5 motores servo inteligentes modulares completamente configurables
- Soportes modulares de aluminio, tubos de fibra de carbono y más
- Pinza en forma de V se abre de 0 a 180 grados
- Compatible con la electrónica del Lynxmotion Servo Erector Set
- Crear secuencias usando el modo de enseñanza manual, coordenadas, brazo virtual
- Características de seguridad integradas (sobre corriente, temperatura, voltaje)
- Protocolo de comunicación LSS fácil de entender y legible por humanos
- 3 x actuadores LSS ST1
- 2 x actuador LSS HT1
- 1 x Adaptador LSS (interfaz de electronics)
- 1 x Adaptador de pared de 12 V con interruptor de encendido/apagado
- 1 x Cable USB
- Todos los soportes, componentes del marco y hardware necesarios
- Destornillador (Phillips PH1, PH2)
- Alcance: 15,819 pulg. / 401,80 mm
- Rotación: 360° / limitada por el cable
 c/ Servos Inteligentes Instalados")
- Ejes: 4 grados de libertad + 1 (pinza)
- Alcance horizontal máximo: 15,819 pulg. / 401,80 mm
- Alcance vertical máximo: 19,808 pulg./ 503,12 mm
- Carga útil: 100 g (alcance máximo)
- Fuente de alimentación: 110V a 240V AC 50 / 60Hz AC (enchufe tipo A de EE.UU.)
- Fuente de alimentación: 12V, 6A DC con conector XT60
- Peso: 1,43 libras / 0,650 Kg
Actuadores
| Ubicación | Tipo | Par Estático | Máxima Velocidad |
| Base | ST1 | 14 kg-cm | 360 °/s |
| Hombro | HT1 | 29 kg-cm | 360 °/s |
| Codo | HT1 | 29 kg-cm | 360 °/s |
| Muñeca | ST1 | 14 kg-cm | 360 °/s |
| Pinza | ST1 | 14 kg-cm | 360 °/s |
Tenga en cuenta que cuando se opera a voltajes más bajos, el par y la velocidad se reducen.
Otros Productos Lynxmotion