







In diesem Bundle enthalten
- 1 X RB-Lyn-739 - Lynxmotion A-Pod Hexapod-Roboter-Kit (nur Bauteile)
- 25 X RB-Hit-29 - Hitec HS-645MG Servomotor
Beschreibung
- Grundlegendes A-Pod-Hexapod-Roboterkit mit Rahmen, Hardware und Servos
- Abgewinkelte Beine für zusätzlichen Bewegungsspielraum mit 3 Freiheitsgraden (DOF)
- Hergestellt aus PVC und hochwertigen Aluminium-Servoaufrichter-Klammern
- Beinhaltet langlebige Aluminium- und Kunststoffteile
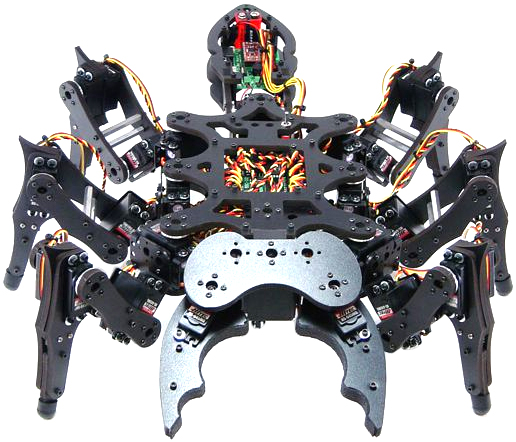
Das Lynxmotion A-Pod Hexapod-Roboter-Kit (ohne Elektronik) ist von Insekten inspiriert. Die abgewinkelten Beine bieten zusätzlichen Bewegungsspielraum. Das Beindesign mit drei Freiheitsgraden (DOF) bedeutet, dass der Roboter in jede Richtung gehen kann. Der Roboter wurde entwickelt, um 18-HS-645-Servos für die Beine und zusätzlich 7 Servos für den Kopf und das Hinterteil zu verwenden. Es ist wirklich erstaunlich, ihn in Aktion zu sehen.

Den Roboter steuern
Durch das Auslagern der Servoimpulserzeugung und des Sequenzbewegungs-Timings auf den SSC-32 (sehr empfehlenswert für mehrbeinige Roboter) hat der Mikrocontroller viel Kraft, um wirklich coole Dinge zu tun. Das Phoenix-Programm ist mit dem BotBoarduino kompatibel und ermöglicht es dem Roboter, mit variabler Geschwindigkeit in jede Richtung zu gehen (Übersetzung) oder sich an Ort und Stelle zu drehen (Rotation), oder eine beliebige Kombination von beiden. Der Beinanhebung und die Fahrhöhe sind einstellbar, ebenso wie die Schrittgeschwindigkeit. Sie können den Körper um jede Achse drehen. Es gibt voreingestellte Schritt- und Gangarten zur Auswahl. Auf diese können über die Steuerung zugegriffen werden. Der Phoenix-Code unterstützt auch einen seriellen Steuerungsmodus zur Steuerung des Roboters über eine serielle Verbindung.
Die Mechanik
Der Roboter besteht aus präzisionsgeschliffenem PVC und extrem belastbaren Aluminium-Servoaufrichter-Klammern.
- A-Pod-Körper-Kit
- A-Pod-Kieferwerkzeug-Kit
- A-Pod-Hinterteil-Kit
- 3x A-Pod-Beinpaar
- 6x SEA-01 Servo Verlängerungskabel - 6"
- 1x
- 25x Hitec HS-645MG Servomotor (133 oz. In.) Standardservos
Benötigt (separat erhältlich)
- BotBoarduino oder anderen Mikrocontroller
- SSC-32-Servocontroller
- USB-Datenübertragungskabel
- Größe (insgesamt): 24,25'' (L) x 17,00'' (B) x bis zu 8,50'' (H)
- Größe (Körper): 9.375'' (L) x 6.625'' (B) x 2.50'' (H)
- Gewicht (ohne Batterien): 6 Pfund 4 Unzen
- Servo-Bewegungssteuerung: Lokaler geschlossener Regelkreis
- Lenkung: Differential
- Anzahl der Beine: 6
- Freiheitsgrade (DOB) pro Bein: 3
- Bewegungsgeschwindigkeit: 10''/s
- Bodenfreiheit: bis zu 7.50''
Kompatibilität der Stromversorgungsoptionen
- Ladegeräte: NiCad- und Ni-MH-Universal-Smart-Ladegerät
- Batterien: 6,0-Volt-Ni-MH-1600mAh / 2800mAh-Akku