





DFRobot Rad Encoder für DFRobot 3PA und 4WD Rover (2pk)
Beschreibung
- Spannung: + 5V
- Encoder sind für DFRobot 3PA und AWD Rover ausgelegt
- Kann Ihnen den Rotationsgrad der Räder geben
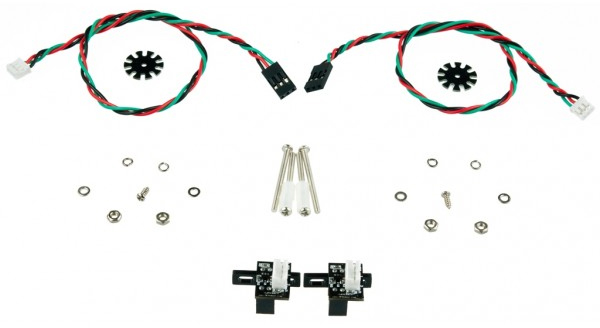
- Enthält Encoder, Plastikschlauch, papiervermittelte Dichtung usw.
Der DFRobot Wheel Encoder für DFRobot 3PA und 4WD Rover (2pk) ist für den Hersteller 3PA und AWD Rover ausgelegt. Er kann Ihnen den Rotationsgrad der Räder geben. Der Encoder verwendet die berührungslose Methode zur Umwandlung der Winkelverschiebungssignale. Beste Passform mit Micro DC Getriebemotor. Es beinhaltet Encoder, Plastikrohr, papiervermittelte Dichtung etc.
Zip-Datei
- Spannung: + 5V
- Strom: <20 mA
- Auflösung: 20 PPR
- Gewicht: 20g
Install requires some work to space the encoder wheels with the plethora of washers and spacers provided. I have a different take on the discussion by another reviewer on the interrupts. You do get different counts based on the pin you connect to, but that is due to the Atmega interrupt scheme. Different chips have different interrupt architectures. Leonardo boards use the 32U4 chip, which have a dedicated interrupt signal on pins 2 and 3, while the UNO uses the 328 chip, which does not. If a pin does not have a dedicated interrupt, it gets lumped into a 'pin-change' interrupt with all the other digital pins that don't have dedicated interrupts. When I used a UNO board and pins 2 and 3, I would get 'cross-talk' between the wheels. It seems that the Arduino library gets the interrupt and tries to decide which registered callbacks should be invoked base on the pin states. If there are more than one 'pin-change' interrupt callback, it seems to be able to get confused. I solved this by manually checking for a pin change-of-state in the interrupt handlers. After doing this (and adding some debounce code as well), I got very consistent count numbers.
These are a little tricky to install on an assembled robot but the instructions are perfect. Once you try to use encoders comes the confusion, at least when using an Arduino mega. I found different readings per wheel and thought there was an encoder problem until I ran an experiment with different intercepts. Someone should write a tutorial on using encoders and intercepts. Here is what I found when using the same encoder at the same speed on different intercept pins: right encoder on intercept 0 (pin 2) Count = 148 right encoder on intercept 3 (pin 20) Count = 28 right encoder on intercept 2 (pin 21) CountA= 28 right encoder on intercept 4 (pin 19) Count = 1276 right encoder on intercept 5 (pin 18) Count = 908 Once you understand this you can make use of whatever formulas per encoder you need to achieve speed or distance results for the wheel pairs.
1. Vous ne pouvez pas installer le panneau arrière sur la plate-forme DFRobot 4WD Mobile avec ces capteurs fixés aux moteurs arrière. Je ferai éventuellement mon propre panneau arrière imprimé en 3D pour résoudre ce problème et la plaque supérieure / inférieure maintiendra le robot en place sans le panneau pour le moment. 2. Il y a beaucoup de redéclenchements / rebondissements du signal et pour me rapprocher du 20 CPR, j'utilise un anti-rebond glissant. Ignorez le temps de 12 000 us à vitesse maximale et supérieur pour les vitesses plus faibles. Je ne sais pas à quel point ces capteurs seront utiles pour surveiller avec précision la distance / la vitesse
Seem to do the job. Gives 5v signal when photo interrupter is blocked by the disk. So far they seem to work reliably. Does not mount on RB-Sbo-02 GM3 - Gear Motor 3 - 90 degree Shaft without modification.
Semble faire le travail. Donne un signal 5v lorsque l’interrupteur photo est bloqué par le disque. Jusqu'à présent, ils semblent fonctionner de manière fiable. Ne pas monter sur le RB-Sbo-02 GM3 - Motoréducteur 3 - Arbre à 90 degrés sans modification
Versand schätzen
Rückgaberecht
Wenn Sie mit einem im Shop gekauften Produkt nicht zufrieden sind, können Sie innerhalb von 30 Tagen ab dem Lieferdatum eine Rücksendung beantragen, es sei denn, das Produkt ist unter den nachstehenden Rückgabeausnahmen aufgeführt oder unterliegt besonderen, auf der Produktseite angegebenen Rückgabebedingungen.
Diese Rückgaberichtlinie gilt als Mindeststandard auch für Produkte, die von Drittanbietern über den Marketplace verkauft und versendet werden.
Bitte lesen Sie die Rückgabebedingungen, die Rückgabeausnahmen sowie das Verfahren So beantragen Sie eine Rücksendegenehmigung (RA), bevor Sie einen Rücksendeantrag stellen.
Für europäische Verbraucher, die ihr gesetzliches Widerrufsrecht ausüben, gelten abweichende Bedingungen. Siehe das Gesetzliche Widerrufsrecht.
Rücksendungen im Rahmen dieser Richtlinie betreffen nicht defekte Produkte. Bei einem bestätigten Herstellungsfehler werden die Abhilfen gemäß den Garantiebedingungen nach Ermessen des Verkäufers abgewickelt. Siehe den Abschnitt Garantie.
Rückgabebedingungen
Um im Rahmen der 30-tägigen Rückgaberichtlinie Anspruch auf eine Erstattung zu haben, müssen alle folgenden Bedingungen erfüllt sein:
- Vor der Rücksendung des Produkts muss eine gültige Rücksendegenehmigungsnummer (RA) eingeholt werden. Rücksendungen ohne RA-Nummer werden abgelehnt.
- Die RA-Nummer ist 30 Tage gültig. Der zurückgesendete Artikel muss innerhalb dieses Zeitraums eingehen.
- Die RA-Nummer muss der Rücksendung beigefügt werden.
- Produkte müssen in ungebrauchtem, unverändertem Zustand (z. B. ohne Kratzer, Veränderungen, fehlende Teile oder Anzeichen von Installation/Gebrauch) und in ihrer Originalverpackung, wiederverkaufsfähig, zurückgesendet werden.
- Versandkosten sind nicht erstattungsfähig. Die Kosten der Rücksendung trägt der Kunde, außer bei einem Produkt, das über das Fehlerbehebungsverfahren von RobotShop als defekt bestätigt wurde, oder bei einem von RobotShop verifizierten Versandfehler.
- Erstattungen werden innerhalb von 7 Tagen nach Eingang und Prüfung des zurückgesendeten Artikels bearbeitet.
- Für Haushaltsroboter, die in gebrauchtem oder unsauberem Zustand zurückgesendet werden, kann eine Reinigungsgebühr von 100 € anfallen.
- Für Rücksendungen großer Mengen von Artikeln, die speziell für den Kunden beim Hersteller bestellt wurden oder nicht zum Standardbestand von RobotShop gehören, kann eine Wiedereinlagerungsgebühr von 20 % anfallen.
Rückgabeausnahmen
Die folgenden Produkte sind im Rahmen dieser Richtlinie nicht rückgabe- oder erstattungsfähig:
- Gebrauchte, beschädigte oder veränderte Produkte — Artikel, die Anzeichen von Gebrauch, Verschleiß oder Veränderung aufweisen und dadurch nicht mehr wiederverkaufsfähig sind.
- Verbrauchsmaterialien * — Gebrauchs- und Verschleißkomponenten, die durch den Gebrauch verändert oder aufgebraucht werden (z. B. Batterien, Riemen, Bürsten, Zahnräder, Filament, Reifen, Einwegbeutel, Schmiermittel, Fette, Wachse usw.). Nach dem Öffnen oder Gebrauch nicht rückgabefähig.
- Verderbliche Waren — Waren, die schnell verderben oder ablaufen können. Nicht rückgabefähig.
- Versiegelte Waren (Gesundheit oder Hygiene) — Artikel, die aus Gründen des Gesundheitsschutzes oder der Hygiene versiegelt sind (z. B. Masken, Handschuhe, geruchsabsorbierende Produkte). Nach dem Entsiegeln nicht rückgabefähig.
- Selbstbauprodukte und Artikel, die eine Montage durch den Kunden erfordern * — Einschließlich Roboter und Bausätze, Roboterteile und andere Produkte, die eine Montage oder Lötung erfordern. Nach dem Zusammenbau, Löten oder Installieren nicht rückgabefähig.
- Digitale Waren, Software und Apps * — Nur Endverkauf, aufgrund von Lizenzbeschränkungen.
- Ausverkaufsartikel * — Als Ausverkauf oder Endverkauf gekennzeichnete Produkte, einschließlich Auslauf- oder eingestellter Artikel.
- Maßgefertigte, personalisierte oder Sonderbestellartikel — Produkte, die nach den eigenen Spezifikationen und Anforderungen des Kunden gefertigt, konfiguriert, angepasst oder gebaut wurden.
- Artikel auf Bestellung * — Standard-Katalogprodukte, die nicht von RobotShop bevorratet und speziell zur Erfüllung eines Kundenwunsches bestellt werden.
- Professionelle und spezialisierte Ausrüstung — Siehe die Seite Garantie für professionelle und spezialisierte Ausrüstung und den Abschnitt Gewerbliche und institutionelle Käufer (B2B) in den Allgemeinen Geschäftsbedingungen.
* Europäische Verbraucher behalten ihr gesetzliches Widerrufsrecht für diese Artikel. Dessen Ausübung unterliegt den im Gesetzlichen Widerrufsrecht festgelegten Bedingungen und Ausschlüssen, und jede Erstattung kann gemindert werden, um einen Wertverlust widerzuspiegeln, der aus einer über die Prüfung hinausgehenden Handhabung resultiert.
So beantragen Sie eine Rücksendegenehmigung (RA)
Obwohl dieselbe Rückgaberichtlinie gilt, erfordern diese Bestellungen ein gesondertes Kontaktverfahren für Rücksendungen.
- Von RobotShop abgewickelte Bestellungen → reichen Sie über Ihr Konto ein Support-Ticket unter Meine Support-Tickets ein.
- Bestellungen von Marketplace-Verkäufern → reichen Sie über Ihr Konto unter Meine Marketplace-Tickets ein Ticket ein, um den Verkäufer direkt zu kontaktieren.
Hinweis: Produkte von Marketplace-Verkäufern sind in der Regel mit SKUs gekennzeichnet, die mit RM beginnen, und werden auf der Produktseite mit dem Hinweis „ Verkauft und versendet von [Name des Verkäufers] “ gekennzeichnet.