













Beschreibung
- BlueROV2 (Acryl - 100m)
- Bietet eine hochauflösende Weitwinkel-Kamera mit geringem Lichtbedarf
- Unterstützt bis zu 6.000 Lumen mit dimmbaren Lichtern
- Verwendet patentierte T2-Antriebe für präzise Bewegungen
- Funktioniert bis zu 100 Meter mit Acrylgehäusen
- Bietet ein modulares Rahmendesign für Erweiterbarkeit
Der BlueROV2 (Acryl - 100m) ist ein erschwingliches, leistungsstarkes Unterwasser-Ferngesteuertes Fahrzeug (ROV), das für seine Flexibilität und Erweiterbarkeit bekannt ist. Erhältlich in Konfigurationen mit sechs und acht Antrieben, unterstützt es eine Vielzahl von Zubehörteilen und arbeitet mit Open-Source-Software, was es zu einer beliebten Wahl unter den Unterwasser-Drohnen macht.
Der BlueROV2 erfordert eine teilweise Montage, die etwa 6-8 Stunden dauert. Dieser Montageprozess gibt den Benutzern ein umfassendes Verständnis der Systemkomponenten und erleichtert zukünftige Upgrades und Verbesserungen.
Ausgestattet mit einer hochauflösenden, Weitwinkel-, Low-Light-Kamera, die auf einem Neigungsmechanismus montiert ist, ermöglicht der BlueROV2 den Piloten, die Neigung der Kamera für optimale Betrachtungswinkel zu steuern. Das ROV kann mit zwei oder vier dimmbaren Lumen-Lichtern konfiguriert werden, die bis zu 6.000 Lumen bieten, um Unterwasserumgebungen zu beleuchten.
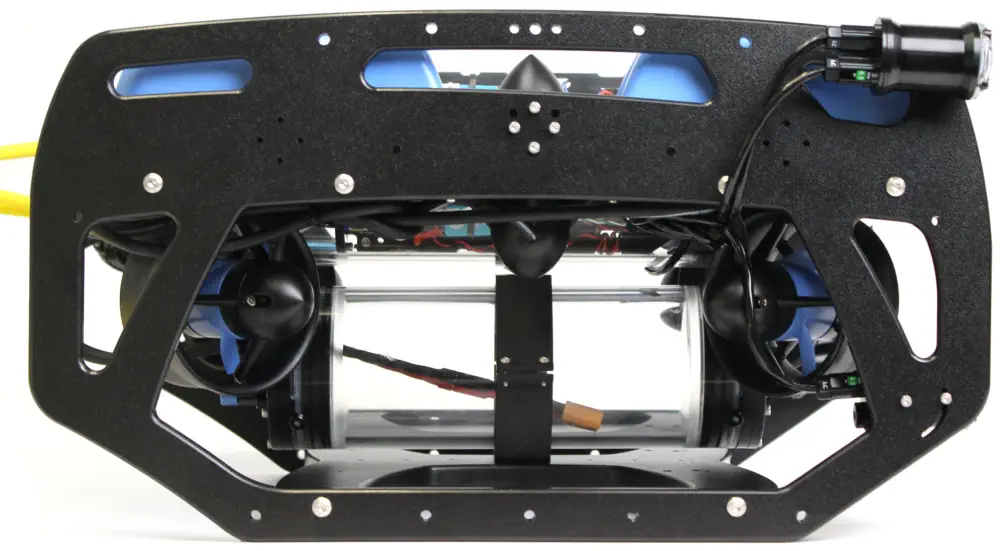
Das ROV verwendet patentierte T2-Antriebe in einer vektorisierten Konfiguration, die ein hohes Schub-Gewicht-Verhältnis und präzise Bewegungen in jede Richtung liefert. Die Standardkonfiguration mit sechs Antrieben kann auf acht Antriebe erweitert werden, indem das Heavy Configuration Retrofit Kit verwendet wird, das eine vollständige Kontrolle über sechs Freiheitsgrade und eine verbesserte Stabilität ermöglicht. Einstellbare Verstärkungsstufen bieten Präzisionssteuerung bei niedrigen Geschwindigkeiten und hohe Leistung, um Strömungen zu navigieren und schwere Lasten zu tragen.
Der BlueROV2 kann mit Acrylplastik- oder eloxierten Aluminiumgehäusen konfiguriert werden. Die Acrylgehäuse sind bis zu einer Tiefe von 100 Metern (328 ft) ausgelegt, während die Aluminiumgehäuse Tiefen von bis zu 300 Metern (984 ft) erreichen können. Hergestellt aus hochwertigen Komponenten, beinhaltet das ROV eine Vakuum-Testpumpe, um vor jedem Tauchgang eine ordnungsgemäße Abdichtung zu gewährleisten.
Mit einem modularen Rahmen konzipiert, ist der BlueROV2 robust und erweiterbar, was die Anbringung verschiedener Zubehörteile wie eines ROV-Greifers oder eines Scan-Sonars ermöglicht. Ein Payload-Skid ist verfügbar, um den Rahmen für größere Nutzlasten zu erweitern, wodurch wissenschaftliche Instrumente, zusätzliche Batteriegehäuse und mehr untergebracht werden können. Benutzer können den Standardrahmen modifizieren, um maßgeschneiderte Unterwasserroboter für spezifische Anwendungen zu erstellen.
Der BlueROV2 wird vom Navigator Flight Controller und BlueOS angetrieben. Der Navigator, ein speziell für ROVs entwickelter Controller, enthält Onboard-Sensoren wie eine Inertial Measurement Unit (IMU), einen Magnetometer und einen Lecksensor. Er verfügt über 16 Ausgänge zum Anschluss von Antrieben, Lichtern, Greifern und anderen Zubehörteilen sowie über mehrere Kommunikationsports für Sensoren und Sonare. Zusammen mit einem Raspberry Pi 4 Computer betreibt der Navigator BlueOS, das die Fahrzeugsteuerung, Kamera- und Tether-Verbindungen verwaltet und Software-Updates erleichtert.
Der Pilot steuert das ROV über einen Laptop und einen Gamepad-Controller, wobei die Open-Source-Anwendung QGroundControl als Benutzeroberfläche dient. Diese Anwendung bietet Live-Video-Streams, Sensor-Feedback und Konfigurationseinstellungen.
Der BlueROV2 eignet sich sowohl für Einsteiger als auch für fortgeschrittene ROV-Benutzer und bietet zahlreiche Optionen für Anpassungen und Erweiterungen.
- 1x BlueROV2 (Acryl - 100m)

- Hochauflösende Weitwinkelkamera mit geringem Lichtbedarf, 1080p Auflösung und 30 fps
- Dimmbare Lumen-Lichter, mit einer maximalen Ausgabe von 6.000 Lumen
- Patentierte T2-Antriebe in einer vektorisierten Konfiguration für Manövrierfähigkeit
- Einstellbare Verstärkungsstufen für die Präzisionssteuerung des Geräts
- Tiefenbewertung von bis zu 100 Metern mit Acrylgehäusen
- Modulares Rahmendesign ermöglicht Erweiterbarkeit
- Gesteuert vom Navigator Flight Controller und der BlueOS-Software
- An Bord befindliche Sensoren umfassen eine IMU, einen Magnetometer und einen Lecksensor
- 16 Ausgänge verfügbar für verschiedene Zubehörteile wie Antriebe, Lichter und Greifer
- Ausgestattet mit einem Raspberry Pi 4 Computer für Verarbeitungs- und Rechenaufgaben
- Verwendet die Open-Source-Anwendung QGroundControl für die Benutzeroberfläche