













Zahlungen und Sicherheit
Ihre Zahlungsinformationen werden sicher verarbeitet. Wir speichern keine Kreditkartendaten und haben keinen Zugriff auf Ihre Kreditkarteninformationen.
Beschreibung
- Allradantrieb
- Einfach zu montieren
- Rahmen aus Aluminiumlegierung
- Geschwindigkeit: 0,6 m / s
- Bewegt sich in jede Richtung, ohne die Ausrichtung zu ändern
- Kommt mit montierten Rädern
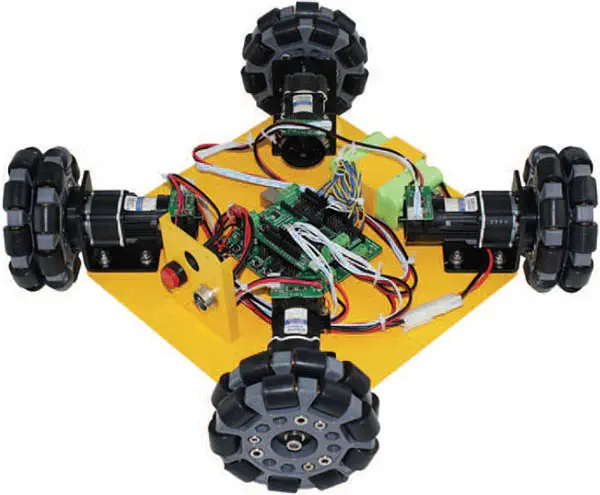
Nexus Robot stellt das Allrad-getriebenes omnidirektionaler Arduino-kompatibler mobiles Roboter-Kit vor . Es enthält Mikrocontroller, IO-Erweiterung, DC-Motor mit Impulsgeber und durch die Änderung der Geschwindigkeit und Richtung jedes Rades kann es sich in jede Richtung bewegen, ohne seine Ausrichtung zu drehen. Es ist ein Lernkit, mit dem Sie lernen und Spaß am Fahren in alle Richtungen haben.
Omnidirektionale Räder sind einzigartig, da sie sich in zwei Richtungen frei bewegen können. Es kann entweder wie ein normales Rad rollen oder seitlich über die Räder rollen. Omni-Richtungs-Räder ermöglichen es einem Roboter, von einem nicht-holonomen zu einem holonomischen Roboter zu konvertieren. Ein nicht holonomischer Roboter, der normale Räder verwendet, hat nur 2 von 3 steuerbaren Freiheitsgraden, die sich vorwärts / rückwärts bewegen und drehen. Nicht in der Lage zu sein, seitliche Wege zu bewegen, macht einen Roboter langsamer und weniger effizient, um sein gegebenes Ziel zu erreichen. Die holonomicomni Directional Räder sind in der Lage, dieses Problem zu überwinden, da es sehr wendig ist. Im Gegensatz zu normalen nicht-holonomischen Robotern kann sich der holonome omnidirektionale Roboter kontinuierlich in eine beliebige Richtung bewegen, ohne die Richtung der Räder zu ändern. Es kann vor und zurück, Gleitbahnen bewegen und dreht sich an der gleichen Position.
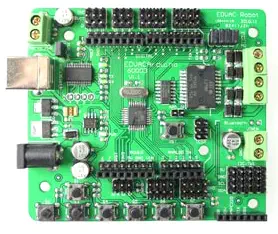
Arduino 328 Mikrocontroller-Platine
Es ist ein Mikrocontroller-Board basierend auf dem Arduino 168. Es hat 14 digitale Eingangs- / Ausgangspins (davon 6 können als PWM-Ausgänge verwendet werden), 8 analoge Eingänge, ein 16 MHz Quarzoszillator, ein USB-Anschluss, eine Steckdose, ein ICSP-Header und eine Reset-Schaltfläche. Es enthält alles, was benötigt wird, um den Mikrocontroller zu unterstützen. Schließen Sie es einfach über ein USB-Kabel an einen Computer an oder versorgen Sie es mit einem AC-DC-Adapter oder einer Batterie, um mit der Arbeit beginnen zu können.
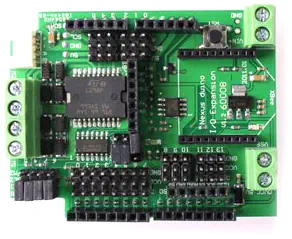
Arduino-E / A-Erweiterung
Nexus Robot bietet die ultimative funktionale Erweiterung für die Arduino IO-Erweiterung V1.2 und ermöglicht Ihnen den einfachen Anschluss von Geräten wie Sensoren, Servos und RS485-Geräten. Diese Sensor-Erweiterungsplatine ist in der Lage, eine Reihe von häufig verwendeten Sensoren einfach anzuschließen.
- 4x 100mm Allrad
- 4x Gleichstrommotor mit Encoder
- 1x Mikrocontroller
- 1x E / A-Erweiterungskarte
Chassis:
- Aussehen: Quadrat
- Maximale Breite: 402mm
- Höhe: 100mm
- Fahrgestellhöhe: 21mm
- Radstand: 260mm
- Gekoppelter Modus: Verdichtung
- Material: Aluminiumlegierung
- Farbe: Gelb, Schwarz
- Geschwindigkeit: 0.6m / s
- Fahrmodus: Allradantrieb
- Kletterkapazität: 20 Grad
- Belastbarkeit: 10kg
- PC104 kompatibel: Ja
Rad:
- Typ: 90-Grad-Omni-Rad
- Durchmesser: 100mm oder 123mm
- Dicke: 38mm
- Material: Nylon oder Aluminiumlegierung
- Belastbarkeit: 20kg
- Material: Gummi oder Nylon
- Durchmesser der Rolle: 19mm
- Länge der Rolle: 19mm
- Gekoppelter Modus: Messingrohr oder Lager