



Beschreibung
- Sechs-Achsen-Roboterarm mit offener Steuerungsschnittstelle
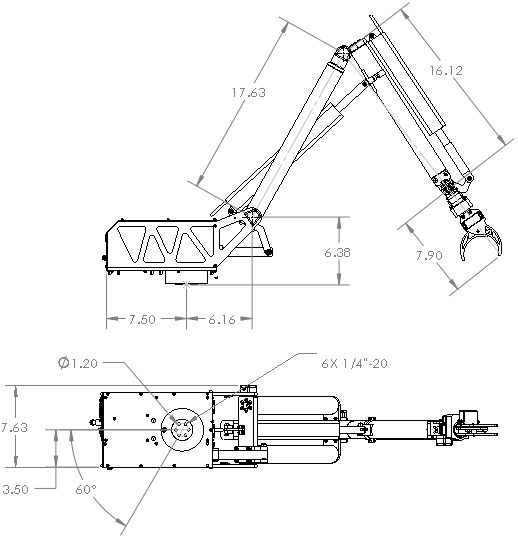
- 2,2m Reichweite und 4,5kg Hubkraft
- Lageregelung an allen 6 Gelenken
- CNC-gefräste Aluminium- und Kohlefaserkonstruktion
Der Advanced Robotic Manipulator (ARM 3.0) - Geschlossener Regelkreis ist ein sechsachsiger Roboterarm mit offener Steuerungsschnittstelle, der eine einfache Implementierung in andere Projekte ermöglicht. Jedem Gelenk wird befohlen, sich über RC-PWM-Signale zu positionieren. Kohlefasersegmente und CNC-gefertigtes Flugzeugaluminium machen den ARM 3.0 zu einer robusten Einheit. Mit einem Reichweiten-Durchmesser von über 2 Metern und der Fähigkeit, 4,5kg (10 Pfund) zu heben, ist er ein sehr fähiger ARM-Wert.

Dieser Arm mit 6 Freiheitsgraden verwendet Linearantriebe und Drehservos, um eine Betriebshüllkurve von mehr als 7 Fuß im Durchmesser zu erzielen. Abgedichtete Kugellager sorgen für präzise Bewegungen an jedem Gelenk. Die unteren 4 Gelenke verwenden Absolutwertgeber zur präzisen, linearen Regelung. Die typische Stromaufnahme bei voller Kapazität beträgt ungefähr 7 Amp. Die Rotationsgeschwindigkeit der Basisverbindung beträgt 60 Grad/Sekunde. Handgelenk dreht 240 Grad in 2,3 Sekunden. Der Greifer bewegt sich in weniger als 1 Sekunde von vollständig geöffnet zu vollständig geschlossen. Der Schutz gegen Rückleistung und der Überstromschutz sind in das Gerät integriert. Ein Leistungsschalter mit grüner LED "Ein" -Statusanzeige befindet sich auf dem Elektronikgehäuse.
Geschlossener-Regelkreis-Positionssteuerung
Alle Verbindungen arbeiten in einem geschlossenen Regelungsmodus. Alle Verbindungen sind PWM-fähig, wenn Sie Befehle von Ihrem Mikrocontroller oder von einem RC-Radio aus eingeben. Alle Gelenke verwenden ein absolutes Feedback. Diese Version des ARM eignet sich am besten für Anwendungen, bei denen der ARM unter Computersteuerung steht und der Computer einen PWM-Befehl an jedes Gelenk des ARM sendet, um zu einer bestimmten Position zu gelangen. Der ARM hält dann diese Position.

Verbesserungen gegenüber Arm 2.0
Der ARM 3.0 nutzt den Erfolg der Projekte ARM 1.0 und 2.0. Es ersetzt ARM 2.0 und bietet eine verbesserte Leistung. Höhere Zuverlässigkeit und höhere Tragfähigkeit sind bemerkenswerte Verbesserungen, sowie optimierte Bewegungsbereiche für jede Verbindung. Eine absolute Encoder-Rückkopplung an den Gelenken verbessert die Auflösung und Linearität der Steuerung und der Positionsrückkopplung.
Eigenschaften
- Behält die Position an den unteren 4 Gelenken bei ausgeschaltetem Strom bei
- Absolute, lineare Rückmeldung von jedem Gelenk
- Robustes Aluminiumgehäuse beherbergt Steuerelektronik
- DB-25-Stecker für Strom- und Signaleingang
- Ein/Aus-Schalter an der Basis
- Kohlefasersegmente
- Kompatibel mit herkömmlichen Funksteuerungen
- LED-Betriebsanzeige
- Umkehrverbindung geschützt
Anwendungen
- Roboter steuert Forschungsprojekte
- Technische Hochschulen
- Manipulator für unbemannte Landfahrzeuge
- Roboterwettbewerbe
- Testen von Produkten in gefährlichen Umgebungen
PDF Datei
- Reichweite: 86,6 Zoll (2,2m) Durchmesser
- Tragfähigkeit: 4,5kg bei voller Ausdehnung
- Schnittstelle: RC PWM
- Eingang: 12V DC, 7.5A (Spitze)
- Gewicht: 20,4lbs (9,2kg)