



Beschreibung
- Sechs-Achsen-Advanced Robot Manipulator (ARM) mit offener Steuerschnittstelle
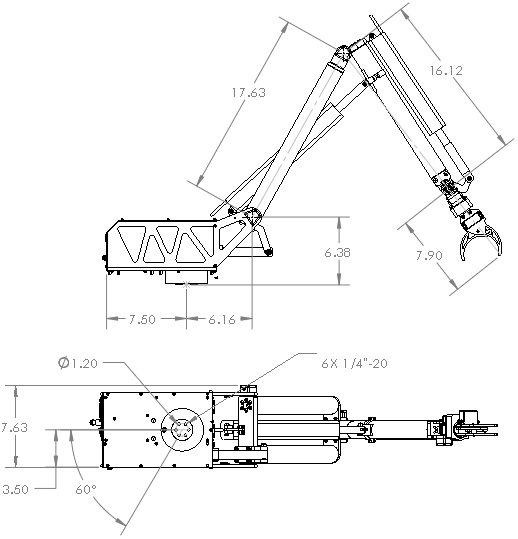
- 2 Meter Reichweiten und Hebekraft von 4,5 kg (10 Pfund)
- hält die Position an den unteren 4 Gelenken bei ausgeschaltetem Strom
- CNC gefrästes Aluminium und Kohlefaser
Der Advanced Roboter-Manipulator (ARM 3.0) - Open Loop ist ein Sechs-Achs-Roboterarm mit einer offenen Steuerschnittstelle, um eine einfache Implementierung in andere Projekte zu ermöglichen. Jedem Gelenk wird befohlen, sich über RC-PWM-Signale zu positionieren. Kohlefasersegmente und CNC-gefertigtes Flugzeugaluminium machen den ARM 3.0 zu einer robusten Einheit. Mit einem Reichweiten-Durchmesser von über 2 Metern und der Fähigkeit, 4,5 kg (10 Pfund) zu heben, ist es ein sehr leistungsfähiger ARM-Wert. Der ARM 3.0 verbessert den ARM 2.0 mit besseren Positionssensoren, robusteren Linearantrieben und leistungsstärkeren Motorsteuerungen.

Dieser Arm mit 6 Freiheitsgraden verwendet Linearantriebe und Drehservos, um eine Betriebshüllkurve von mehr als 7 Fuß im Durchmesser bereitzustellen. Abgedichtete Kugellager sorgen für präzise Bewegungen an jedem Gelenk. Die unteren 4 Gelenke verwenden Absolutwertgeber zur präzisen, linearen Regelung. Die typische Stromaufnahme bei voller Kapazität beträgt ungefähr 7 Ampere. Die Rotationsgeschwindigkeit der Basisverbindung beträgt 60 Grad / Sekunde. Das Handgelenk dreht sich um 240 Grad in 2,3 Sekunden. Der Greifer bewegt sich in weniger als 1 Sekunde von vollständig geöffnet zu vollständig geschlossen. Der Schutz gegen Rückleistung und der Überstromschutz sind in das Gerät integriert. Ein Leistungsschalter mit grüner LED "Ein" -Statusanzeige befindet sich auf dem Elektronikgehäuse.

Open-Loop-Geschwindigkeitsregelung
Alle Verbindungen in dieser Version des ARM arbeiten im Open-Loop-Geschwindigkeitsmodus. Dieser ARM ist am freundlichsten, wenn ein Joystick oder eine Funksteuereinheit verwendet wird, damit ein menschlicher Bediener den ARM direkt steuern kann. Wenn der ARM mit einem Radio oder einem Joystick verbunden ist, wird dieser Position halten, wenn der Joystick zentriert ist, und beginnt sich zu bewegen, während der Bediener den Joystick von der Mitte aus bewegt. Je weiter der Joystick von der Mitte entfernt wird, desto schneller bewegt sich der ARM. Wird der Joystick in die andere Richtung bewegt, kehrt der ARM die Richtung um. Diese Version des ARM kann out-of-the-box ausgeführt werden, indem 12VDC-Strom und ein beliebiges Standard-RC-Radio mit dem Eingangsanschluss verbunden werden.

Eigenschaften
- absolute, lineare Rückmeldung von jedem Gelenk
- Endschalter an Hubenden von Linearantrieben
- ein robustes Aluminiumgehäuse beinhaltet die Steuerelektronik
- DB-25-Stecker für Strom- und Signaleingang
- Ein/Ausschalter an der Basis
- Kohlefasersegmente
- CNC gefräste Aluminiumkonstruktion
- Kompatibel mit herkömmlichen Funksteuerungen
- Betriebsanzeige-LED
- 12VDC Leistung
- vor Verpolung geschützt
Anwendungen
- robotergesteuerte Forschungsprojekte
- technische Hochschulen
- Manipulator für unbemannte Landfahrzeuge
- Roboterwettbewerbe
- Testen von Produkten in gefährlichen Umgebungen
PDF Datei
- Reichweite: 86,6 "(2,2 m) Durchmesser
- Tragfähigkeit: 4.5 kg bei voller Ausdehnung
- Freiheitsgrade: 6
- Schnittstelle: RC PWM
- Gewicht: 20,4 lbs (9,2 kg)
- Eingang: 12VDC, Peak 7,5A