











Description
- Robotachtige grijphand die zich aanpast aan alle onderdelen
- 3 gelede vingers en 4 grijpfuncties passen zich aan verschillende maten en vormen aan
- Eenvoudige bediening via Ethernet/IP, Modbus RTU, DeviceNet of EtherCAT
- Afmetingen: 9 inch in blokjes
- Gewicht: 2.1 kg
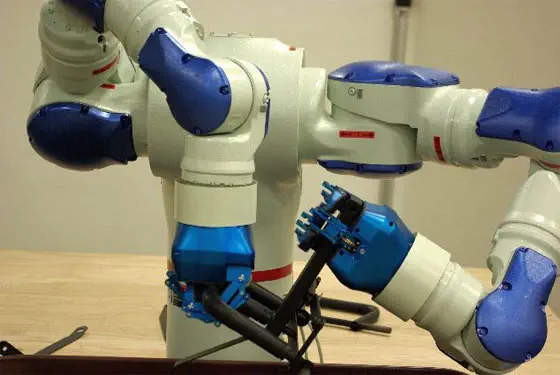
De Robotiq Adaptieve Grijphand is 's werelds eerste industriële handige grijper die industriële robots "hand-achtige" mogelijkheden geeft om hun vermogen om een grotere verscheidenheid aan onderdelen te manipuleren, een grip te detecteren en de druk op een bepaald onderdeel te regelen. Deze Grijper is gericht op toepassingen die een zeer grote verscheidenheid aan onderdelen hanteren en een ingewikkelde geometrie hebben. Het is bedoeld voor verschillende toepassingen zoals Manufacturing, Teleoperation en Research.

Hoe het werkt
- De grijper is samengesteld uit 3 gelede vingers en 4 grijpfuncties om een groot aantal objecten van verschillende grootten en vormen te grijpen.
- Verzend eenvoudige open-close-opdrachten en laat de grijper zich aanpassen aan elke geometrie.
- Regel de sluitsnelheid en kracht. Mogelijk gedeeltelijke sluiting/opening.
- Ontvangstdetectiefeedback van de grijper ontvangen.
- Ingebouwde grijpercontroller maakt communicatie via Ethernet / IP, Modbus RTU, DeviceNet of EtherCAT mogelijk. Programmeer de hand van de teach pendant.
- Deze elektrische grijper wordt geleverd met de mechanische bevestiging voor uw robotarm of robot. Heeft twee connectoren aan de zijkant voor 24V-voeding en communicatie.

Gerichte robotica-applicaties
Productie: werk met een enkele tool om delen van verschillende afmetingen en vormen te kiezen, vast te houden en te plaatsen. Gebruik in toepassingen zoals assemblage, machinebelading, montage of positionering van onderdelen.
Voordelen
Wanneer 10 of 100 verschillende delen moeten worden behandeld: onderdelen overbrengen, machine neigen, Jig-Less-lassen.
- Herprogrammeer in plaats van opnieuw in te stellen om de instelkosten en -tijd te verlagen
- Een enkele robot-tool voor een grote verscheidenheid aan onderdelen, waardoor handmatige bewerkingen en complexe gereedschappen worden geëlimineerd
- Elimineert het wisselen van gereedschap om de cyclustijd te verkorten
- Verlaag tijd en kosten voor aangepaste grijperontwerpen
- Weet of u het onderdeel kunt vasthouden voordat u de robot verplaatst om beschadiging van onderdelen of apparatuur te voorkomen
- Regel de druk om kwetsbare of gevaarlijke voorwerpen veilig te hanteren
Telewerking: voor verbeterde vingergevoeligheid en intuïtieve bediening.
Voordelen
Of het nu om een IED- of HAZMAT-toepassing gaat, u gebruikt een robot omdat het een gevaarlijke omgeving is of een locatie waar menselijke toegang moeilijk is. Nu kunt u de mogelijkheden van uw robot verbeteren met de Adaptieve Grijper .
- Deze robothand past zich automatisch aan aan de vorm van elk object, omdat u de robot niet terug wilt brengen om de grijper te wijzigen of het gereedschap te wijzigen.
- Zorgt voor intuïtieve bediening, zodat de operator alleen hoogstaande open/sluit-opdrachten hoeft te verzenden en de grijper doet de rest.
- Verbeterde vingergevoeligheid met vier grijpfuncties, instelbare snelheid en kracht.
- Drie gelede vingers kunnen zich omwikkelen en gevaarlijke voorwerpen veilig vasthouden. Het kan ook menselijke gereedschappen bevatten zoals een mes of een kleine schop.

Onderzoek: Voor onderzoeksmanipulatie in ongestructureerde omgevingen.
Voordelen
- De grijper past zich automatisch aan om alles vast te pakken met behulp van eenvoudige open en dicht opdrachten op hoog niveau. Richt je op je onderzoek, laat de grijper het grijpen aangrijpen.
- Robothand geeft feedback over de greepstatus die als trigger in de robotprogrammering moet worden gebruikt.
- Drie vingers met elk drie falanxen, vier grijpvormen, regelbare snelheid en kracht breiden de manipulatiemogelijkheden van je robot uit.
- De grijper wordt ook gebruikt in industriële omgevingen waar hij niet mag falen. U profiteert van dezelfde betrouwbaarheid.

Integratie
- De Adaptieve Grijper kan op elke industriële robot worden geïnstalleerd.
- In de meeste gevallen configureren we uw Adaptieve Grijper voor een snelle integratie in uw robot: wordt geleverd met de opgegeven faceplate of mechanische houder, connector (s) en communicatieprotocol.
- U installeert de grijper op uw robot met behulp van schroeven en sluit de connector (s) aan.
- Gebruik de teach-hanger en de bijgeleverde lijst met opdrachten om de grijper te programmeren. Voor een bepaald onderdeel geeft u het grijptype, de sluitsnelheid en kracht op.
- De grijper stuurt informatie over de grijpstatus terug naar de controller.
- Als er meer precisie nodig is bij het plaatsen van onderdelen, kan de grijper worden gebruikt in combinatie met een visie of een polskracht-torsiesensor.
- Robotiq Adaptieve Grijper
- Stroom- en communicatiekabels
- Afmetingen: 9x9x9 inch
- Gewicht: 2.1 kg
Zip bestand
PDF bestand
CAD-bestanden
Mechanisch
- Grijperopening: 1-155 mm
- Grijpergewicht: 2.3 kg
- Aanbevolen omvattende greepbelasting: 10 kg
- Aanbevolen wrijving greep payload: 2.5kg
- Maximale grijpkracht (vingertopgreep): 15-60N
- Max. Breekkracht: 100N
- Max. sluitsnelheid (vingertopgreep): 110 mm/sec
- Min. omgevingstemperatuur: -10°C
- Max. omgevingstemperatuur: 50°C
- Herhaalbaarheid vingerpositie (vingertopgreep): 0.05 mm
- Aantal vingers: 3
- Aantal falanxen per vinger: 3
- Aantal grijpmodi: 4
- IP-klasse: 31
Controle
- Interface-opties: Ethernet / IP, Modbus RTU, Modbus TCP / IP, DeviceNet, CANopen of EtherCAT
- Programmeerbare parameters vastleggen: positie, snelheid en krachtcontrole van elke vinger Laterale vingerpositieregeling
- Status-LED's: voeding, communicatie en fouten
- Feedback: Gripdetectie, motor-encoderpositie en motorstroom
Elektrisch
- Nominale voedingsspanning: 24VDC
- Rustvermogen (minimaal energieverbruik): 4.1W
- Piekvermogen (bij maximale grijpkracht): 36W
- Maximale RMS-voedingsstroom (voedingsspanning bij 24 V): 1.4A