













Description
- BlueROV2 (Acryl - 100m)
- Beschikt over een high-definition groothoekcamera met weinig licht
- Ondersteunt tot 6.000 lumen met dimbare lichten
- Maakt gebruik van gepatenteerde T2 Thrusters voor nauwkeurige beweging
- Werkt tot 100 meter diep met acryl behuizingen
- Biedt een modulair frameontwerp voor uitbreidbaarheid
De BlueROV2 (Acryl - 100m) is een betaalbare, krachtige onderwater op afstand bediende voertuig (ROV) bekend om zijn flexibiliteit en uitbreidbaarheid. Beschikbaar in configuraties met zes en acht thrusters, ondersteunt het een verscheidenheid aan accessoires en werkt het op open-source software, waardoor het een populaire keuze is onder onderwaterdrones.
De BlueROV2 vereist gedeeltelijke montage, die ongeveer 6-8 uur in beslag neemt. Dit montageproces geeft gebruikers een uitgebreid begrip van de systeemcomponenten, wat toekomstige upgrades en verbeteringen vergemakkelijkt.
Uitgerust met een high-definition, groothoek, weinig licht camera gemonteerd op een kantelmechanisme, stelt de BlueROV2 piloten in staat om de kanteling van de camera te regelen voor optimale kijkhoeken. De ROV kan worden geconfigureerd met twee of vier dimbare Lumen Lights, die tot 6.000 lumen bieden om onderwateromgevingen te verlichten.
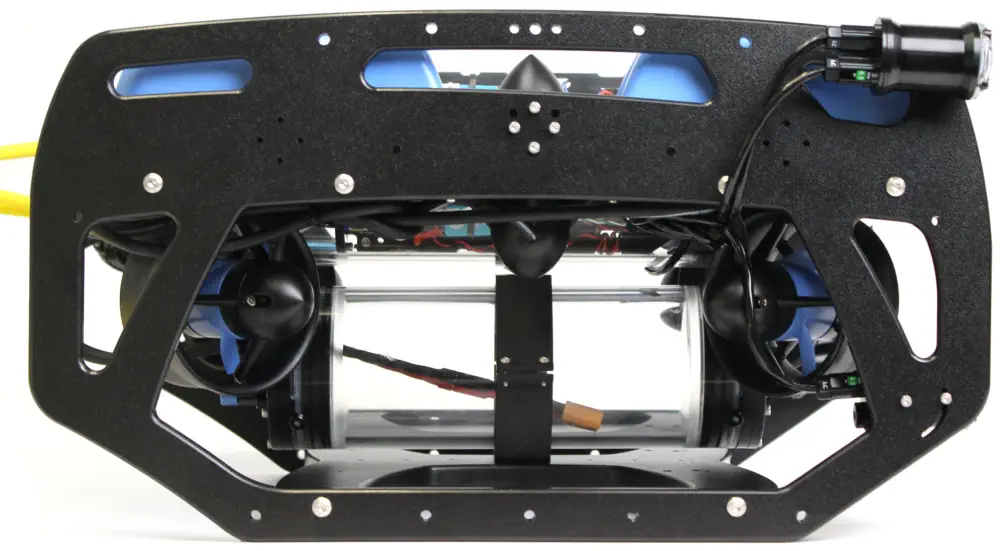
De ROV maakt gebruik van gepatenteerde T2 Thrusters in een gevectoriseerde configuratie, die een hoge stuwkracht-gewichtsverhouding en nauwkeurige beweging in elke richting levert. De standaard configuratie met zes thrusters kan worden uitgebreid naar acht thrusters met behulp van de Heavy Configuration Retrofit Kit, waardoor volledige zes-graden-van-vrijheid controle en verbeterde stabiliteit mogelijk is. Verstelbare gain niveaus bieden precisie controle bij lage snelheden en hoge kracht om stromingen te navigeren en zware lasten te dragen.
De BlueROV2 kan worden geconfigureerd met acryl plastic of geanodiseerde aluminium behuizingen. De acryl behuizingen zijn beoordeeld tot een diepte van 100 meter (328 ft), terwijl de aluminium behuizingen diepten tot 300 meter (984 ft) kunnen bereiken. Gemaakt van hoogwaardige componenten, bevat de ROV een vacuümtestpomp om een goede afdichting te garanderen voor elke duik.
Ontworpen met een modulair frame, is de BlueROV2 robuust en uitbreidbaar, waardoor verschillende accessoires zoals een ROV grijper of scanning sonar kunnen worden bevestigd. Een payload skid is beschikbaar om het frame uit te breiden voor grotere payloads, waarbij wetenschappelijke instrumenten, extra batterij behuizingen, en meer kunnen worden ondergebracht. Gebruikers kunnen het standaard frame aanpassen om aangepaste onderwaterrobots te creëren die zijn afgestemd op specifieke toepassingen.
De BlueROV2 wordt aangedreven door de Navigator Flight Controller en BlueOS. De Navigator, een speciaal gebouwde controller voor ROV's, bevat ingebouwde sensoren zoals een traagheidsmetingseenheid (IMU), magnetometer, en leksensor. Het beschikt over 16 uitgangen voor het aansluiten van thrusters, lichten, grijpers, en andere accessoires, samen met meerdere communicatiepoorten voor sensoren en sonars. Gekoppeld aan een Raspberry Pi 4 computer, draait de Navigator BlueOS, dat voertuigbesturing, camera, en tether verbindingen beheert, en software-updates faciliteert.
De piloot bedient de ROV via een laptop computer en gamepad controller, met behulp van de open-source QGroundControl applicatie als de gebruikersinterface. Deze applicatie biedt live videostreams, sensorfeedback, en configuratie-instellingen.
De BlueROV2 is geschikt voor zowel beginnende als gevorderde ROV-gebruikers, en biedt talrijke opties voor aanpassing en uitbreiding.
- 1x BlueROV2 (Acryl - 100m)

- High-definition groothoekcamera met weinig licht mogelijkheid, 1080p resolutie, en 30 fps
- Dimbare Lumen Lights, met een maximale output van 6.000 lumen
- Gepatenteerde T2 Thrusters in een gevectoriseerde configuratie voor wendbaarheid
- Verstelbare gain niveaus voor precisie controle van het apparaat
- Diepte beoordeling van maximaal 100 meter met acryl behuizingen
- Modulair frameontwerp maakt uitbreidbaarheid mogelijk
- Gecontroleerd door de Navigator Flight Controller en BlueOS software
- Aan boord sensoren omvatten een IMU, magnetometer, en leksensor
- 16 uitgangen beschikbaar voor diverse accessoires zoals thrusters, lichten, en grijpers
- Uitgerust met een Raspberry Pi 4 computer voor verwerking en computing taken
- Maakt gebruik van de open-source QGroundControl applicatie voor de gebruikersinterface