



Description
- Zes-assige robotarm met een open besturingsinterface
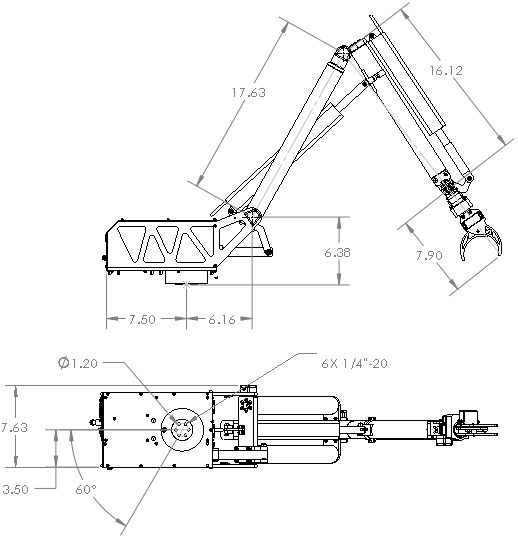
- Doorsnede van 2,2 meter en de mogelijkheid om 4,5 kg (10 pond) op te tillen
- Closed-loop positiecontrole op alle 6 verbindingen
- CNC gefreesde aluminium en koolstofvezel constructie
De Geavanceerde Robotica Manipulator (ARM 3.0) - Gesloten Kring is een robotarm met zes assen en een open besturingsinterface voor eenvoudige implementatie in andere projecten. Elke verbinding wordt bevolen om via RC PWM-signalen te positioneren. Koolstofvezelsegmenten en CNC gefreesd vliegtuigkwaliteit aluminium maken de ARM 3.0 tot een robuuste eenheid. Met een reikwijdte van meer dan 2 meter en een hefvermogen van 4,5 kg (10 pond) is het een zeer capabele ARM-waarde.

Deze arm van 6 vrijheidsgraden maakt gebruik van lineaire aandrijvers en roterende servo's om een operatiekoppel van meer dan 7 ft in diameter te bieden. Afgedichte kogellagers zorgen voor nauwkeurige bewegingen bij elke verbinding. De onderste 4 verbindingen maken gebruik van absolute encoders voor nauwkeurige, lineaire besturing. Typische stroomafname bij volledige capaciteit is ongeveer 7 ampere. Rotatiesnelheid van basisverbinding is 60 graden / seconde. De pols draait 240 graden in 2,3 seconden. De grijper beweegt in minder dan 1 seconde van volledig open naar volledig gesloten. Omgekeerde stroombeveiliging en overmatige stroombeveiliging is ingebouwd in het apparaat. Een aan / uit-schakelaar met groene LED-statusindicatie "on" bevindt zich op de elektronicabehuizing.
Gesloten positie regeling
Alle verbindingen werken in een gesloten-regelstandmodus. Alle verbindingen zijn gereed voor PWM als u ervoor kiest om opdracht te geven via uw microcontroller of vanaf een RC-radio. Alle verbindingen maken gebruik van absolute feedback. Deze versie van de ARM is het meest geschikt voor toepassingen waarbij de ARM onder computerbesturing staat en waarbij de computer een PWM-opdracht naar elke verbinding van de ARM stuurt om naar een specifieke positie te gaan. De ARM zal dan die positie behouden.

Verbeteringen over arm 2.0
De ARM 3.0 maakt gebruik van het succes van de ARM 1.0- en 2.0-projecten. Het vervangt ARM 2.0 en biedt verbeterde prestaties. Betere betrouwbaarheid en meer hefvermogen zijn opmerkelijke verbeteringen evenals beter geoptimaliseerde reeksen van reizen voor elk gewricht. Absolute feedback van encoders op de gewrichten verbetert de resolutie en lineariteit van de regeling en positionering.
Kenmerken
- Houdt positie op lagere 4 verbindingen terwijl de stroom is uitgeschakeld
- Absolute, lineaire feedback van elke verbinding
- Robuuste aluminium behuizing bevat besturingselektronica
- DB-25-connector voor voeding en signaalingang
- Aan / uit-schakelaar op basis
- Koolstofvezel segmenten
- Compatibel met conventionele radiobesturingsunits
- Power-indicator LED
- Omgekeerde verbinding beveiligd
toepassingen
- Robotic controleert onderzoeksprojecten
- Universitaire technische laboratoria
- Manipulator voor onbemande voertuigen op de grond
- Robotwedstrijden
- Testen van producten in gevaarlijke omgevingen
PDF bestand
- Bereik envelop: 86,6-inch (2,2 m) diameter
- Hefcapaciteit: 10 lbs (4,5 kg) bij volledige extensie
- Interface: RC PWM
- Input: 12V DC, 7,5A (piek)
- Gewicht: 20,4 lbs (9,2 kg)