













Betalingen en veiligheid
Uw betalingsgegevens worden veilig verwerkt. We slaan geen creditcardgegevens op en hebben ook geen toegang tot uw creditcardgegevens.
Description
- 4 Wheel drive
- Eenvoudig te monteren
- Frame van aluminiumlegering
- Snelheid: 0,6 m / s
- Beweegt in elke richting zonder de orientatie te veranderen
- Wordt geleverd met alleen wielen die niet zijn gehecht
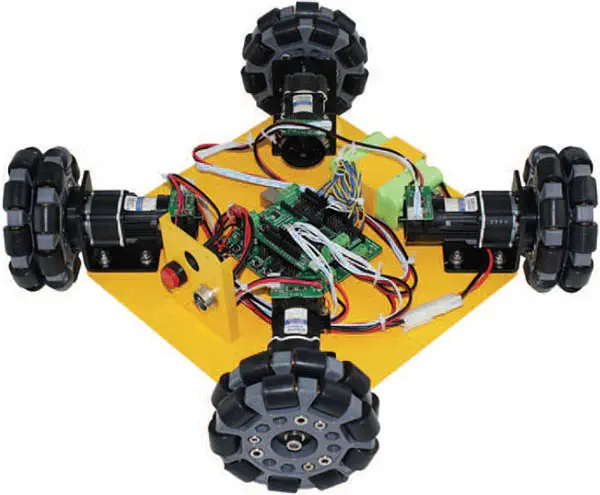
Nexus Robot introduceert de 4WD Omni-Directionele Arduino Compatibele Mobiele Robotset . Het omvat microcontroller, IO-uitbreiding, DC-motor met encoder en door te variëren van de snelheid en richting van elk wiel die in elke richting kan bewegen zonder zijn oriëntatie te veranderen. Het is een leerpakket voor u om te leren en te genieten van het plezier van omni direction moving.
Omnidirectionele wielen zijn uniek omdat ze vrij in twee richtingen kunnen rollen. Het kan of als een normaal wiel rollen of lateraal rollen met behulp van de wielen langs de omstandigheden. Omni-directionele wielen laten een robot van een niet-holonomische naar een holonomische robot omzetten. Een niet-holonomische robot die normale wielen gebruikt, heeft slechts 2 van de 3 bestuurbare vrijheidsgraden die zijn - vooruit / achteruit en rotatie bewegingen. Niet in staat zijn om van kant te bewegen, maakt een robot langzamer en minder efficiënt in het bereiken van zijn gegeven doel. De holonomicomni-directionele wielen zijn in staat om dit probleem te overwinnen, omdat het zeer manoeuvreerbaar is. In tegenstelling tot een normale niet-holonomische robot kan de holonomische omnidirectionele robot continu in een willekeurige richting bewegen zonder de richting van de wielen te veranderen. Het kan heen en weer bewegen, glijbanen en draait op dezelfde positie.
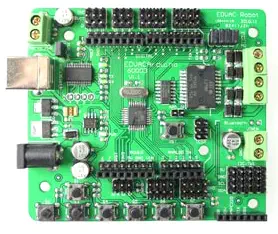
Arduino 328 microcontroller bord
Het is een microcontrollerbord gebaseerd op de Arduino 168. Het heeft 14 digitale invoer / uitvoerpinnen (waarvan 6 kunnen worden gebruikt als PWM-uitgangen), 8 analoge ingangen, een 16 MHz kristaloscillator, een USB-aansluiting, een stroomaansluiting, een ICSP-header en een resetknop. Het bevat alles wat nodig is om de microcontroller te ondersteunen; sluit hem gewoon op een computer aan met een USB-kabel of gebruik hem met een AC-naar-DC-adapter of batterij om aan de slag te gaan.
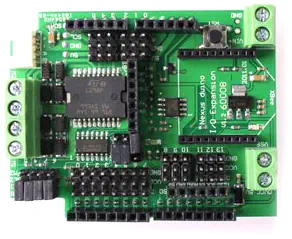
Arduino IO-uitbreiding
Nexus Robot biedt de ultieme functionele uitbreiding voor Arduino IO Expansion V1.2 en biedt u extra gemak om een apparaat zoals sensoren, servo en RS485-apparaat aan te sluiten. Deze sensor-uitbreidingskaart is in staat om eenvoudig een aantal veel gebruikte sensoren aan te sluiten.
- 100 mm omni-wiel X 4
- DC-motor met encoder X 4
- Microcontroller X 1
- IO-uitbreidingskaart X 1
PDF-bestanden
- Data papier
- Brochure
- Omni-wheel introductie
- Arduino IO-uitbreiding
- Arduino Microcontroller Board
- Handleiding
Zip-bestanden
Chassis:
- Uiterlijk: vierkant
- Maximale breedte: 402 mm
- Hoogte: 100 mm
- Chassishoogte: 21 mm
- Wielbasis: 260 mm
- Gekoppelde modus: verdichting
- Materiaal: aluminiumlegering
- Kleur: geel, zwart
- Snelheid: 0,6 m / s
- Rijmodus: 4-wielaandrijving
- Klimvermogen: 20 graden
- Laadvermogen: 10kg
- Compatibel met PC104: Ja
Wiel:
- Type: 90 graden Omni Wheel
- Diameter: 100 mm of 123 mm
- Dikte: 38 mm
- Materiaal: polyurethaan
- Laadvermogen: 20kg
- Diameter van de rol: 19 mm
- Lengte van de rol: 19 mm
- Gekoppelde modus: koperen buis of lagers