Fuerte resistencia a la interferencia de la luz ambiental
Bajo consumo de energía
Frecuencia de escaneo: 6 ~ 12 Hz
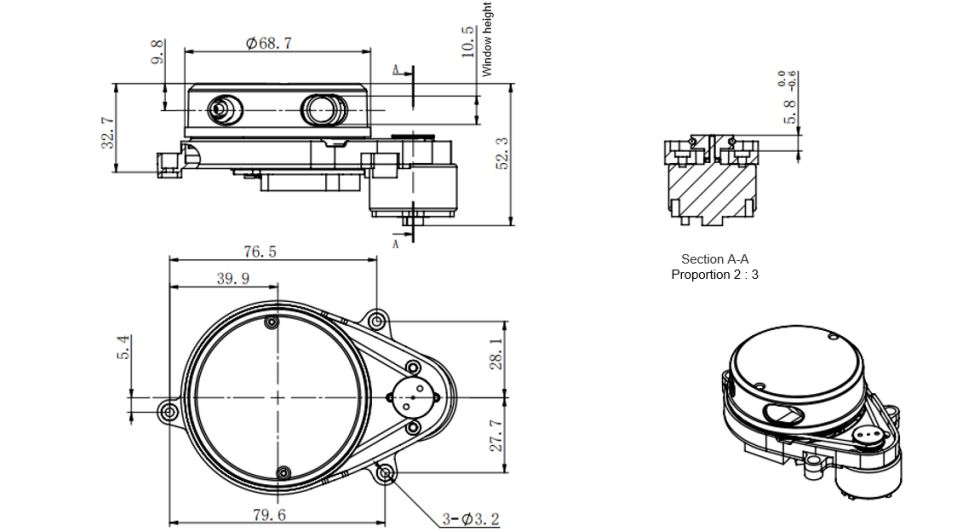
El Telémetro 2D de 360 grados YDLIDAR X4PRO es un telémetro bidimensional de 360 grados (en lo sucesivo, X4PRO) desarrollado por el equipo de EAI. Basado en el principio de triangulación, está equipado con óptica, electricidad y diseño de algoritmo relacionados para lograr mediciones de distancia de alta frecuencia y alta precisión. La estructura mecánica gira 360 grados para generar continuamente la información del ángulo, así como los datos de la nube de puntos del entorno de escaneo durante el alcance.
X4PRO proporciona una interfaz de receptáculo PH2.0-8P con interfaces funcionales para la alimentación del sistema, la comunicación de datos y el control del motor. X4PRO utiliza un puerto serie de 3,3 V (UART) para la comunicación dúplex y solo admite la comunicación unidireccional (Tx) para el enlace descendente de datos. El usuario puede conectar el sistema externo y el producto a través de la interfaz física del producto y comunicarse de acuerdo con el protocolo de comunicación del sistema para obtener la nube de puntos escaneada en tiempo real.
X4PRO es un controlador de motor con su propia función de regulación de velocidad del motor. M_CTR es la señal de control de velocidad del motor, que se puede utilizar para la regulación de la velocidad de voltaje y la depuración de ondas PWM. Cuanto menor sea el ciclo de trabajo de voltaje/PWM, mayor será la velocidad del motor. 0V / Velocidad máxima al 0% del ciclo de trabajo.
Aplicaciones
Navegación robótica y evación de obstáculos
Enseñanza e investigación sobre ROS
Seguridad territorial
Escaneo ambiental y reconstrucción 3D
Navegación y evasión de obstáculos del robot aspirador/robot de aprendizaje ROS
Si no está satisfecho con un producto comprado en el Sitio, puede solicitar una devolución en un plazo de 30 días a partir de la fecha de entrega, salvo que el producto figure entre las Excepciones de devolución que aparecen a continuación o esté sujeto a condiciones de devolución específicas indicadas en la página del producto.
Esta política de devolución también se aplica, como norma mínima, a los productos vendidos y enviados por vendedores externos a través del Marketplace.
Los consumidores europeos que ejercen su derecho legal de desistimiento están sujetos a condiciones diferentes. Consulte el Derecho legal de desistimiento.
Las devoluciones previstas en la presente política se refieren a productos no defectuosos. En caso de defecto de fabricación confirmado, las soluciones se tramitan conforme a las condiciones de Garantía, a discreción del Vendedor. Consulte la sección Garantía.
Condiciones de devolución
Para poder optar a un reembolso en el marco de la política de devolución de 30 días, deben cumplirse todas las condiciones siguientes:
Debe obtenerse un número de autorización de devolución (RA) válido antes de devolver el producto. Las devoluciones sin número RA serán rechazadas.
El número RA es válido durante 30 días. El artículo devuelto debe recibirse dentro de ese plazo.
El número RA debe incluirse con la devolución.
Los productos deben devolverse en estado nuevo y sin modificar (por ejemplo, sin rayaduras, alteraciones, piezas faltantes ni signos de instalación o uso) y en su embalaje original, apto para la reventa.
Los gastos de envío no son reembolsables. Los gastos de devolución corren a cargo del cliente, salvo en caso de producto confirmado como defectuoso a través del proceso de diagnóstico de RobotShop o de un error de envío verificado por parte de RobotShop.
Los reembolsos se procesan en un plazo de 7 días tras la recepción e inspección del artículo devuelto.
Puede aplicarse una tarifa de limpieza de 100 € a los robots domésticos devueltos en estado usado o no limpio.
Puede aplicarse una tarifa de reposición del 20 % a las devoluciones en gran cantidad de artículos pedidos específicamente para el cliente al fabricante o que no formen parte del inventario estándar de RobotShop.
Excepciones de devolución
Los siguientes productos no son aptos para devolución ni reembolso en el marco de la presente política:
Productos usados, dañados o modificados — Artículos que muestren signos de uso, desgaste o alteración que los hagan no aptos para la reventa.
Consumibles * — Componentes de uso y desgaste, alterados o agotados por el uso (por ejemplo, pilas, correas, cepillos, engranajes, filamento, neumáticos, bolsas desechables, lubricantes, grasas, ceras, etc.). No aptos para devolución una vez abiertos o usados.
Productos perecederos — Bienes susceptibles de deteriorarse o caducar con rapidez. No aptos para devolución.
Bienes precintados (salud o higiene) — Artículos precintados por motivos de protección de la salud o de higiene (por ejemplo, mascarillas, guantes, productos antiolores). No aptos para devolución una vez desprecintados.
Productos para montar uno mismo y artículos que requieren montaje por el cliente * — Incluidos robots y kits, piezas de robot y otros productos que requieren montaje o soldadura. No aptos para devolución una vez montados, soldados o instalados.
Bienes digitales, software y aplicaciones * — Venta final únicamente, debido a las restricciones de licencia.
Artículos en liquidación * — Productos identificados como de liquidación o venta final, incluidos los artículos de fin de vida útil o descatalogados.
Artículos hechos a medida, personalizados o de pedido especial — Productos fabricados, configurados, adaptados o construidos según las especificaciones y requisitos propios del cliente.
Artículos bajo pedido * — Productos del catálogo estándar no almacenados por RobotShop y pedidos específicamente para atender una solicitud del cliente.
* Los consumidores europeos conservan su derecho legal de desistimiento sobre estos artículos. Su ejercicio está sujeto a las condiciones y exclusiones establecidas en el Derecho legal de desistimiento, y todo reembolso podrá reducirse para reflejar una disminución de valor resultante de una manipulación que vaya más allá de la inspección.
Cómo solicitar una autorización de devolución (RA)
Aunque se aplica la misma política de devolución, estos pedidos requieren un proceso de contacto distinto para las devoluciones.
Pedidos gestionados por RobotShop → envíe un ticket de asistencia desde su cuenta, en Mis tickets de asistencia.
Pedidos de vendedores del Marketplace → envíe un ticket desde su cuenta, en Mis tickets de Marketplace, para contactar directamente con el vendedor.
Nota: los productos de los vendedores del Marketplace suelen llevar SKU que empiezan por RM y se identifican en la página del producto con la mención « Vendido y enviado por [Nombre del vendedor] ».