Compacta. Navega por caminos estrechos con facilidad
Emplea la tecnología de localización SLAM de última generación
Adecuada para diversos entornos, incluyendo supermercados y hoteles
Cuenta con una vida útil de batería ultra larga y una capacidad de escalada excepcional
Peso Máximo de Carga: 60 kg
La Base de Robot Athena 2.0 Slamtec es una plataforma de desarrollo compacta de tamaño pequeño a mediano, construida por SLAMTEC. Está diseñada con una estructura compacta y una extraordinaria capacidad para navegar por caminos estrechos. El producto incorpora el último sistema de localización y navegación autónoma SLAM Cube 2, junto con una solución de navegación de visión láser. Esto le permite moverse de forma autónoma y evitar obstáculos, proporcionando una plataforma robusta para un rápido desarrollo secundario y ofreciendo soluciones óptimas para el desarrollo de robots.
La Athena 2.0 emplea soluciones de localización y navegación SLAM, una tecnología de última generación en el campo de la robótica. Esta tecnología permite la localización y mapeo simultáneos (SLAM) de los entornos del robot. Utiliza cámaras y LiDAR para generar mapas precisos y robustos para la navegación y la evasión de obstáculos. Además, puede ubicarse con precisión en entornos con condiciones de iluminación fluctuantes y evitar obstáculos en tiempo real.
Manteniendo el diseño de cuerpo compacto de su predecesora, Athena 1.0, la Athena 2.0 cuenta con impresionantes capacidades de navegación en pasillos estrechos. Esto la hace adecuada para una amplia gama de escenarios de pasillos estrechos. Ha encontrado un uso extenso en diversos entornos, incluyendo supermercados, centros comerciales, restaurantes, hoteles, salas de exposiciones, y más.
Como una robusta plataforma de desarrollo de robots, la Athena 2.0 integra una vida útil de batería ultra larga y una capacidad de escalada excepcional para satisfacer los requisitos operativos de los robots bajo diversas condiciones. La gestión remota de las plataformas Athena 2.0 registradas se puede lograr a través del servicio SLAMTEC RoboCloud, permitiendo funcionalidades más extendidas.
La Athena 2.0 opera con la solución de localización y navegación autónoma de Slamtec, eliminando la necesidad de pegar códigos QR en el entorno para la calibración de la ubicación. Es una plataforma de software y hardware completamente abierta que ofrece soporte para hardware externo. Los desarrolladores pueden utilizar el Slamware SDK 2.0 para el desarrollo de aplicaciones de lógica de negocio.
1x Base de Robot Athena 2.0 Slamtec
1x Estación de Carga
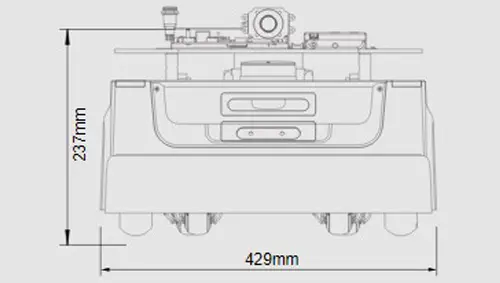
429 x 460 x 237 mm (largo x ancho x alto)
Área máxima de mapeo: 300 x 300 m
Rendimiento de movimiento
Altura de cruce vertical: 20 mm
Ancho de cruce horizontal: 40 mm
Ancho mínimo de recorrido (base del robot): 550 mm
Característica principal: Localización y navegación SLAMWARE
Carga nominal: 40 kg
Carga máxima (superficie de hormigón plana): 60 kg
Rendimiento del sensor
LIDAR
Radio de escaneo (90 % de reflectividad): 30 m (LIDAR TOF S2)
Cámara de profundidad
Cantidad: 1 unidad estándar
Rango de detección: 0,3 m - 3,5 m (varía según las condiciones de iluminación)
Campo de visión (FOV): H:75±3°; V:51±3°
Sensor de detección de obstáculos bajos y desniveles
Cantidad: 1
Altura mínima de detección para obstáculos bajos: >3 cm
Sensor magnético (deshabilitado de forma predeterminada, habilitado cuando sea necesario)
Cantidad: 2
Rango máximo de detección: 35 mm
Parachoques
Cantidad: 2
Modo de activación: colisiones físicas
Fuerza mínima detectable: 8 N
Rendimiento de mapeo
Resolución de mapa: 50 mm
Rendimiento de movimiento
Velocidad máxima de movimiento: 1,2 m/s
Velocidad de movimiento predeterminada: 0,7 m/s
Velocidad máxima de movimiento en modo de mapeo: 0,6 m/s
Pendiente transversal máxima: 10° Pendiente: Ángulo máximo de pendiente del chasis: 10°; Pendiente = 18 % × Rampa; La altura del centro de masa de la máquina completa está dentro de los 18 cm y la rampa de seguridad dentro de los 10°. (Una pendiente del 100 % significa una rampa de 45°, cuya diferencia de altura para 100 m es de 100 m).
Juego de ruedas: Motor en rueda de 6,5 pulgadas x2 | Rueda universal industrial de 2,5 pulgadas x4
Interfaz de usuario
Interfaz de hardware
Conector de alimentación: CC 24 V 10 A | CC 12 V 2 A
HDMI: 1x HDMI
Audio: 1x conector para auriculares de 3,5 mm | 1x conector de audio LINE_MIC (co-lay con conector para auriculares) | 1 conector de amplificador de doble canal de 5 W/8 Ω
Interfaz de red
Ethernet: 1 puerto Gigabit Ethernet RJ45
Wi-Fi: 2,4 GHz/5 GHz
Interfaz de software: SLAMWARE: Las API HTTP admiten diferentes lenguajes de programación y plataformas, como Windows, iOS, Android y Linux
Ethernet
Wi-Fi: Entorno de red sin autenticación
4G: Admite tarjetas SIM 4G de operadores nacionales e internacionales (personalizadas según las necesidades)
Batería y capacidad
Especificación de capacidad: 20 Ah (batería de fosfato de hierro y litio) (complemento)
Estado estacionario: >19 h (sin carga, entorno de temperatura ambiente)
Tiempo de funcionamiento sin carga: >15 h (sin carga, entorno de temperatura ambiente)
Tiempo de funcionamiento con carga completa: 8 h (40 kg, entorno de temperatura ambiente)
Tiempo de carga: 3 a 4 h (cargador estándar)
Vida útil de la batería: La capacidad disminuye al 60 % de la capacidad inicial después de 2000 ciclos completos de carga y descarga
Consumo de energía
Consumo de energía en modo de espera: 17 W (sin carga)
Consumo de energía nominal con carga completa: 40 W (en movimiento)
Consumo de energía máximo con carga externa: 240 W
Salida nominal: 25,2 V 2 A
Ruido
Nivel de ruido de funcionamiento: ≤60 db
Entorno de funcionamiento
Temperatura de funcionamiento: 0 °C ~ 40 °C
Temperatura de transporte y almacenamiento: -25-+55 °C
Humedad de funcionamiento: 20 ~ 90 % rh (sin condensación)
Si no está satisfecho con un producto comprado en el Sitio, puede solicitar una devolución en un plazo de 30 días a partir de la fecha de entrega, salvo que el producto figure entre las Excepciones de devolución que aparecen a continuación o esté sujeto a condiciones de devolución específicas indicadas en la página del producto.
Esta política de devolución también se aplica, como norma mínima, a los productos vendidos y enviados por vendedores externos a través del Marketplace.
Los consumidores europeos que ejercen su derecho legal de desistimiento están sujetos a condiciones diferentes. Consulte el Derecho legal de desistimiento.
Las devoluciones previstas en la presente política se refieren a productos no defectuosos. En caso de defecto de fabricación confirmado, las soluciones se tramitan conforme a las condiciones de Garantía, a discreción del Vendedor. Consulte la sección Garantía.
Condiciones de devolución
Para poder optar a un reembolso en el marco de la política de devolución de 30 días, deben cumplirse todas las condiciones siguientes:
Debe obtenerse un número de autorización de devolución (RA) válido antes de devolver el producto. Las devoluciones sin número RA serán rechazadas.
El número RA es válido durante 30 días. El artículo devuelto debe recibirse dentro de ese plazo.
El número RA debe incluirse con la devolución.
Los productos deben devolverse en estado nuevo y sin modificar (por ejemplo, sin rayaduras, alteraciones, piezas faltantes ni signos de instalación o uso) y en su embalaje original, apto para la reventa.
Los gastos de envío no son reembolsables. Los gastos de devolución corren a cargo del cliente, salvo en caso de producto confirmado como defectuoso a través del proceso de diagnóstico de RobotShop o de un error de envío verificado por parte de RobotShop.
Los reembolsos se procesan en un plazo de 7 días tras la recepción e inspección del artículo devuelto.
Puede aplicarse una tarifa de limpieza de 100 € a los robots domésticos devueltos en estado usado o no limpio.
Puede aplicarse una tarifa de reposición del 20 % a las devoluciones en gran cantidad de artículos pedidos específicamente para el cliente al fabricante o que no formen parte del inventario estándar de RobotShop.
Excepciones de devolución
Los siguientes productos no son aptos para devolución ni reembolso en el marco de la presente política:
Productos usados, dañados o modificados — Artículos que muestren signos de uso, desgaste o alteración que los hagan no aptos para la reventa.
Consumibles * — Componentes de uso y desgaste, alterados o agotados por el uso (por ejemplo, pilas, correas, cepillos, engranajes, filamento, neumáticos, bolsas desechables, lubricantes, grasas, ceras, etc.). No aptos para devolución una vez abiertos o usados.
Productos perecederos — Bienes susceptibles de deteriorarse o caducar con rapidez. No aptos para devolución.
Bienes precintados (salud o higiene) — Artículos precintados por motivos de protección de la salud o de higiene (por ejemplo, mascarillas, guantes, productos antiolores). No aptos para devolución una vez desprecintados.
Productos para montar uno mismo y artículos que requieren montaje por el cliente * — Incluidos robots y kits, piezas de robot y otros productos que requieren montaje o soldadura. No aptos para devolución una vez montados, soldados o instalados.
Bienes digitales, software y aplicaciones * — Venta final únicamente, debido a las restricciones de licencia.
Artículos en liquidación * — Productos identificados como de liquidación o venta final, incluidos los artículos de fin de vida útil o descatalogados.
Artículos hechos a medida, personalizados o de pedido especial — Productos fabricados, configurados, adaptados o construidos según las especificaciones y requisitos propios del cliente.
Artículos bajo pedido * — Productos del catálogo estándar no almacenados por RobotShop y pedidos específicamente para atender una solicitud del cliente.
* Los consumidores europeos conservan su derecho legal de desistimiento sobre estos artículos. Su ejercicio está sujeto a las condiciones y exclusiones establecidas en el Derecho legal de desistimiento, y todo reembolso podrá reducirse para reflejar una disminución de valor resultante de una manipulación que vaya más allá de la inspección.
Cómo solicitar una autorización de devolución (RA)
Aunque se aplica la misma política de devolución, estos pedidos requieren un proceso de contacto distinto para las devoluciones.
Pedidos gestionados por RobotShop → envíe un ticket de asistencia desde su cuenta, en Mis tickets de asistencia.
Pedidos de vendedores del Marketplace → envíe un ticket desde su cuenta, en Mis tickets de Marketplace, para contactar directamente con el vendedor.
Nota: los productos de los vendedores del Marketplace suelen llevar SKU que empiezan por RM y se identifican en la página del producto con la mención « Vendido y enviado por [Nombre del vendedor] ».