




Descripción
- Perro Robótico Cyberstars Cyber1 Dev (Tech Gray)
- Robot cuadrúpedo enfocado en desarrolladores con acceso completo al SDK y soporte de desarrollo de segunda generación
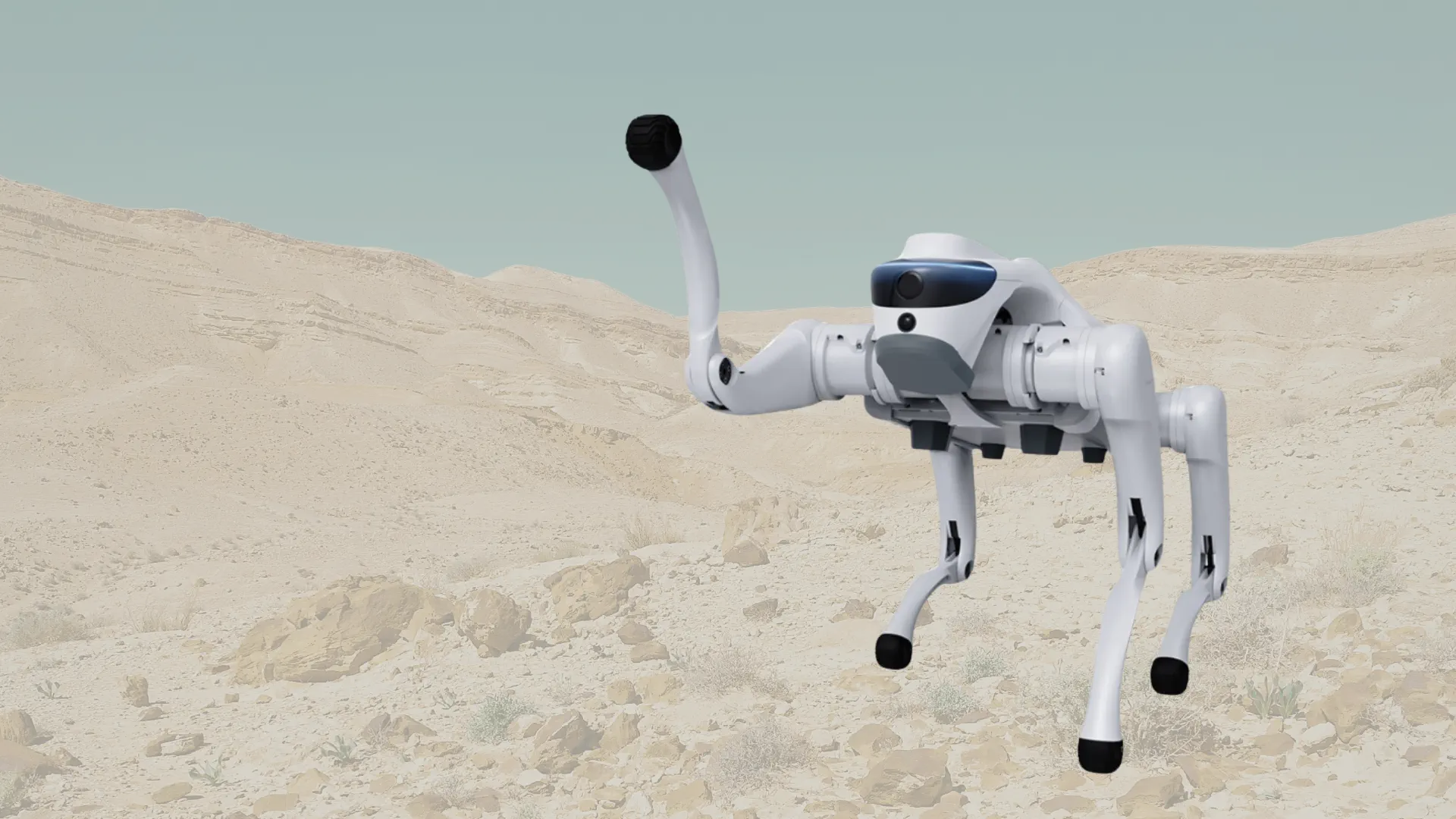
- 12 grados de libertad con un par de torsión máximo de 45 N.m para un movimiento ágil y dinámico
- CPU ARM de 8 núcleos con 6 TOPS de potencia de cálculo para control de movimiento y percepción en tiempo real
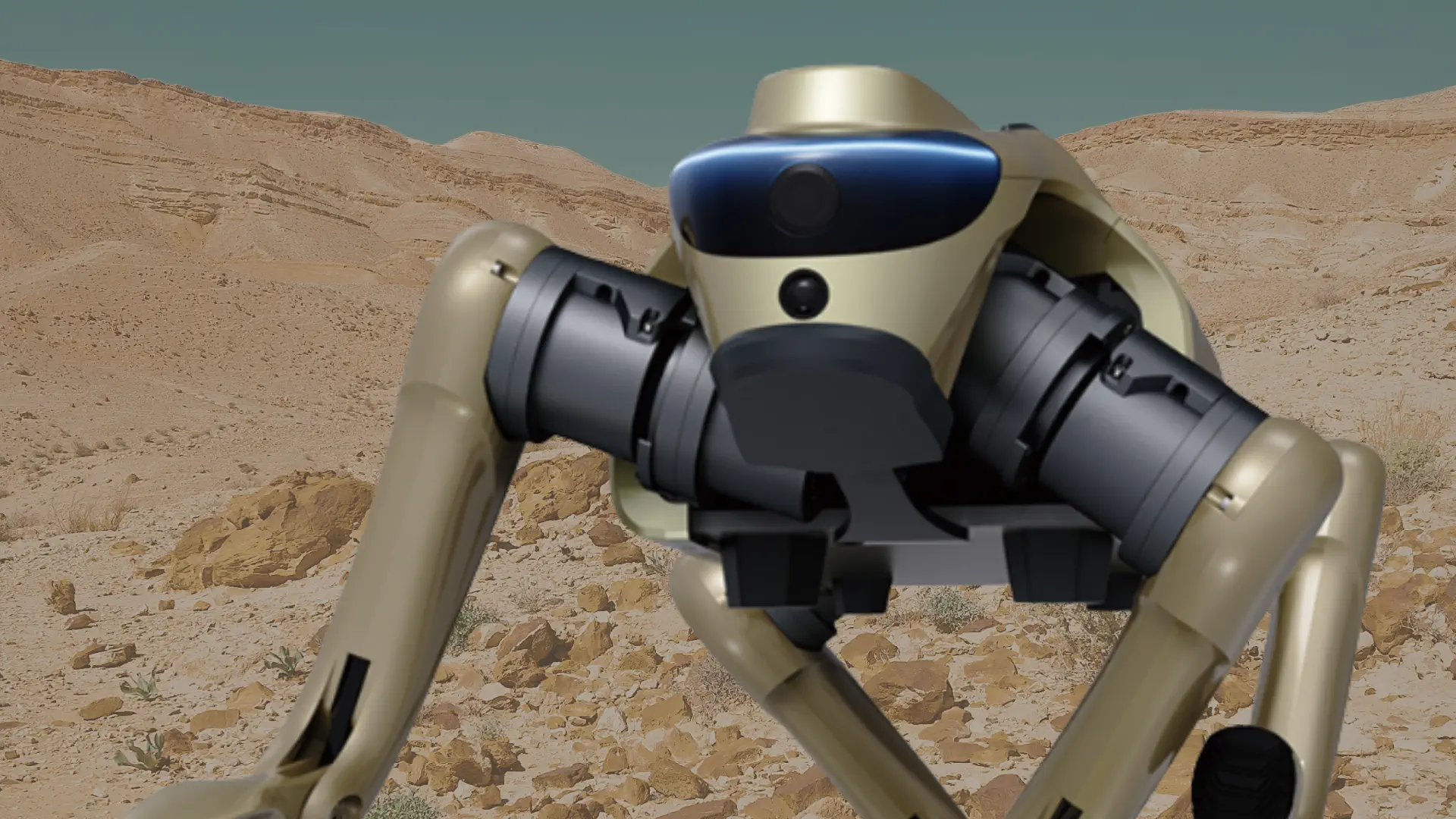
- Cámara frontal ultra gran angular de 1920x1080 emparejada con radar ultrasónico delantero y trasero
- Batería inteligente de 9,6 Ah con BMS de grado automotriz para un tiempo de operación extendido
- Conectividad a través de 4G, WiFi 2,4G y Bluetooth con soporte para actualizaciones OTA
Perro Robótico Cyberstars Cyber1 Dev (Tech Gray) es una plataforma de robot cuadrúpedo desarrollada por Hangzhou Cyberstars Intelligent Technology Co., Ltd., diseñada específicamente para desarrolladores de robótica e investigadores técnicos que buscan acceso práctico al control de movimiento y sistemas embebidos. Construido sobre una arquitectura de hardware autodesarrollada, el Cyber1 Dev incluye doce grados de libertad a través de sus cuatro extremidades, permitiendo una amplia gama de comportamientos dinámicos, incluyendo saltos, paradas de manos y locomoción multidireccional. Sus motores de articulación de alto par proporcionan el rendimiento mecánico necesario para el despliegue en el mundo real a través de terrenos irregulares, escalones e inclinaciones. La plataforma está diseñada para aquellos que necesitan acceso directo a la capa de control del robot en lugar de una experiencia lista para el consumidor.
El Cyber1 Dev desbloquea el acceso completo al SDK y capacidades de desarrollo de segunda generación, brindando a los desarrolladores las herramientas para construir, probar e iterar algoritmos de movimiento personalizados y programas de comportamiento directamente en el hardware. Su sistema de percepción a bordo combina una cámara de alta resolución y gran angular con sensores de radar ultrasónicos duales para una conciencia ambiental confiable, apoyando la evasión autónoma de obstáculos y pipelines de retroalimentación visual. Las opciones de conectividad, incluyendo 4G, WiFi y Bluetooth, permiten una integración flexible en redes de investigación y flujos de trabajo de monitoreo remoto. Con soporte para actualizaciones OTA y un marco de desarrollo abierto, el Cyber1 Dev se posiciona como un punto de entrada capaz para profesionales de la robótica, laboratorios académicos y equipos técnicos que construyen sobre una plataforma cuadrúpeda de grado comercial.

Productos originales con cobertura de garantía aprobada por el fabricante.

Aduana, inspección y preparación gestionadas localmente antes del envío.

Ventas, soporte y devoluciones gestionados por un único equipo.

Documentación, tutoriales y respuestas de la comunidad para avanzar más rápido.


El Cyber1 Dev combina acceso de desarrollo abierto con inteligencia a bordo robusta, brindando a los usuarios técnicos una plataforma lista para el desarrollo de algoritmos personalizados, tareas de percepción en el mundo real y escenarios de despliegue conectado.
Una cámara frontal ultra gran angular de 1920x1080 combinada con radar ultrasónico delantero y trasero proporciona una conciencia ambiental completa. El pipeline de detección combinado permite la detección y evasión autónoma de obstáculos en entornos dinámicos.
El Cyber1 Dev incluye soporte completo de SDK y funcionalidad de desarrollo de segunda generación, lo que permite a los desarrolladores escribir, probar e implementar programas de movimiento personalizados directamente en el hardware. Las actualizaciones OTA amplían continuamente las capacidades de la plataforma sin cambios de hardware.
Los módulos integrados de 4G, WiFi 2.4G y Bluetooth permiten una comunicación fluida en diversas configuraciones de red. Esta pila de conectividad soporta monitoreo remoto, transmisión de video en vivo e integración en infraestructuras de investigación o despliegue.
Un procesador ARM de 8 núcleos con 6 TOPS de rendimiento computacional impulsa el control de movimiento en tiempo real y el procesamiento de percepción a bordo. Combinado con un BMS de grado automotriz y una batería inteligente de 9600 mAh, la plataforma mantiene sesiones operativas de dos a cuatro horas.




| • | Perro Robótico Cyber1 Dev |
| • | Batería Inteligente (9,6 Ah, 28,8 V) |
| • | Cargador (33,6 V, 5 A) |
El contenido del paquete varía según la configuración. El control remoto visual es opcional y no está incluido por defecto.
| • | 67 x 36 x 43 cm |
| • | 15,4 kg (±0,5 kg) |
Los valores mostrados son de referencia del fabricante.
Documentación
| • | SDK completo incluido |
| • | Soportado en variante Dev |
| • | Tech Gray |
| Cyber1 Dev | Cyber1 Pro | Cyber1 Edu | |
| Dimensiones de Pie | 67 x 36 x 43 cm | 67 x 36 x 43 cm | 67 x 36 x 43 cm |
| Peso (incl. batería) | 15,4 kg (±0,5 kg) | 15,4 kg (±0,5 kg) | 15,4 kg (±0,5 kg) |
| Velocidad Máxima | 3 m/s | 3 m/s | 3 m/s |
| Carga Útil | 8 kg | 8 kg | 8 kg |
| Par Máximo de Articulación | ~45 N.m | ~45 N.m | ~45 N.m |
| Grados de Libertad | 12 | 12 | 12 |
| Capacidad de Cómputo | CPU de 8 núcleos, 6 TOPS | CPU de 8 núcleos, 6 TOPS | CPU de 8 núcleos, 6 TOPS |
| Batería Inteligente | 9600mAh (28,8V / 276,48Wh) | 9600mAh (28,8V / 276,48Wh) | 9600mAh (28,8V / 276,48Wh) |
| Pendiente Máxima de Escalada | 40° | 40° | 40° |
| Altura Máxima de Caída en Escalada | 15 cm | 15 cm | 15 cm |
| Módulo 4G | Sí | Sí | Sí |
| Actualización OTA | Sí | Sí | Sí |
| Función de 2do Desarrollo | Sí | No | No |
| SDK | Sí | No | No |
| Función de Investigación EDU | No | No | Sí |
| Entrenamiento de Aprendizaje por Refuerzo | No | No | Sí |
| Aplicación Móvil | Sí | Sí | Sí |
| Control Remoto Visual | Opcional | Opcional | Opcional |
| Material | Aleación de aluminio + plástico de ingeniería de alta resistencia | Aleación de aluminio + plástico de ingeniería de alta resistencia | Aleación de aluminio + plástico de ingeniería de alta resistencia |