







Description
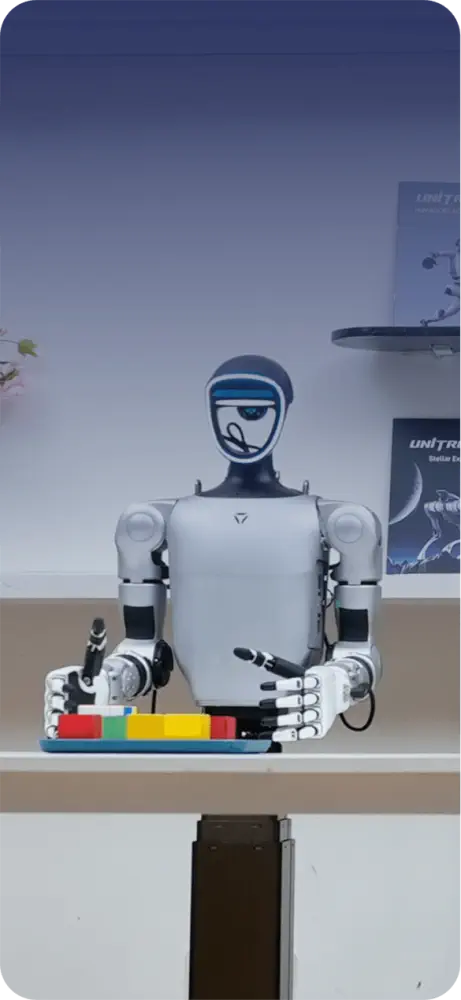
- Unitree G1-D Ultimate B Plateforme Robot Humanoïde (Mains Dex3)
- Système de perception multi-capteurs
- Développement secondaire pris en charge ; ordinateur de visualisation inclus
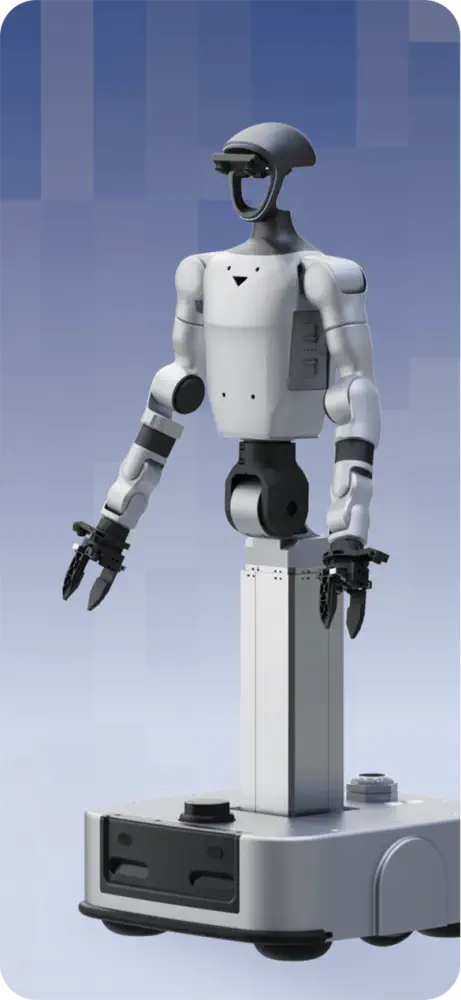
- Robot humanoïde à base de roues avec deux bras
- Mains habiles à trois doigts Dex3-1 contrôlées par la force (avec caméra RGB et sans retour tactile)
- Nombre total de degrés de liberté : 33
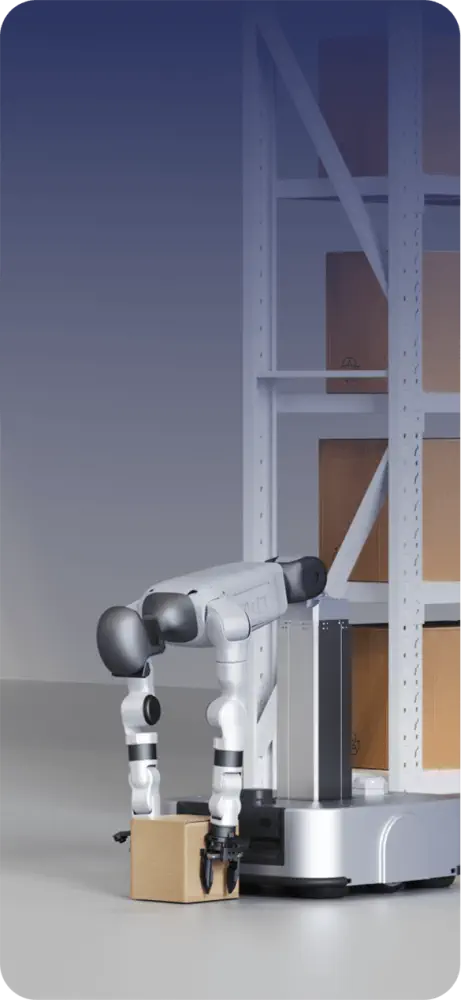
La Unitree G1-D Ultimate B Plateforme Robot Humanoïde (Mains Dex3) est la configuration G1-D Ultimate B à base de roues qui conserve le châssis mobile Ultimate A et l'ensemble de capteurs, mais améliore les effecteurs finaux avec des mains habiles à trois doigts Dex3-1 (sans retour tactile, avec caméra RGB) pour les tâches mobiles nécessitant une articulation plus fine des doigts.
La plateforme G1-D est construite autour d'un corps supérieur humanoïde de taille réelle avec une structure cinématique de 17 degrés de liberté (hors effecteur final), une colonne de levage verticale avec une course de 500 mm pour une hauteur de travail ajustable, et un ensemble de perception multi-capteurs intégré (vision binoculaire montée sur la tête plus caméras de poignet) pour soutenir les flux de travail de manipulation et de téléopération ; elle est fournie avec l'électronique de contrôle standard/logiciel et l'interface d'alimentation/recharge requise pour le déploiement. En tant que revendeur autorisé avec un support et une logistique locaux, RobotShop agit comme un point de contact unique pour l'achat et le service après-vente, réduisant les frictions par rapport à un achat direct auprès du fabricant et évitant la nécessité d'expédier le robot à l'étranger pour le support ou la résolution.

Produits authentiques avec couverture de garantie approuvée par le fabricant.

Douanes, inspection et préparation gérées localement avant expédition.

Ventes, support et retours gérés par une seule équipe.

Documents, tutoriels et réponses communautaires pour avancer plus rapidement.
pour Robot Humanoïde
Plateformes humanoïdes propriétaires construites de bout en bout avec des actionneurs, des ensembles d'engrenages, des encodeurs et une détection intégrée en interne.
Un flux de travail unique couvrant l'ensemble du cycle de vie des données : capture, traitement, annotation, validation et gestion des actifs de l'ensemble de données.
Prend en charge la formation distribuée, la création de modèles personnalisés et le déploiement fluide, avec une compatibilité avec les principaux cadres open-source.



Accélérez la collecte de données et réduisez les coûts de fonctionnement avec des flux de travail flexibles et standardisés — remplaçant les méthodes manuelles lentes par un processus reproductible.

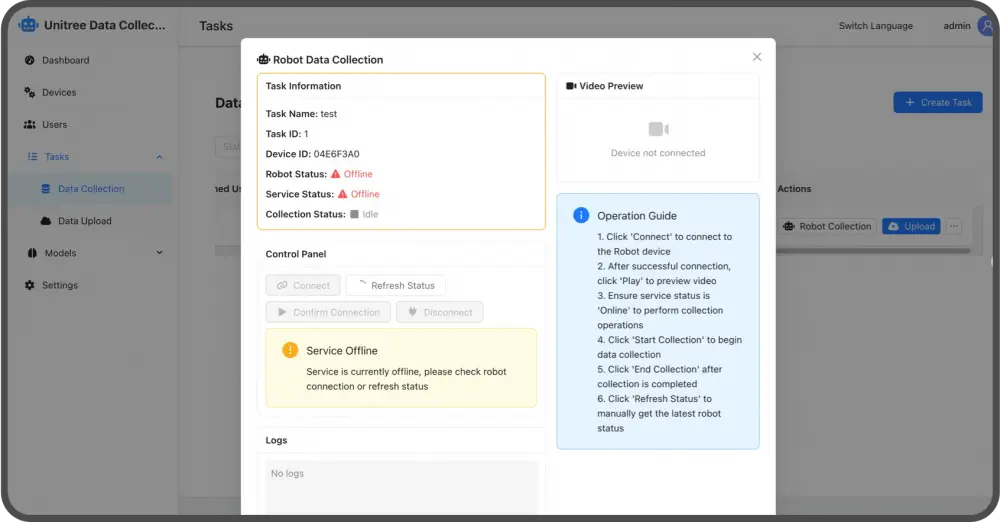
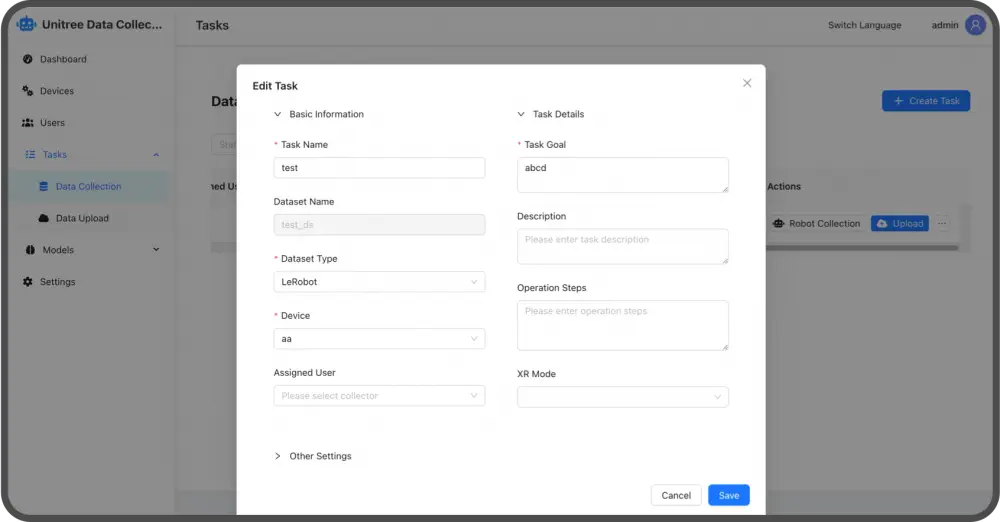
Combine la coordination de projet, l'attribution de tâches, le suivi de l'avancement et le rapport de statut en un seul espace de travail. En utilisant des modèles réutilisables, les tâches de collecte peuvent être créées en un seul clic. La visibilité en temps réel à travers le pipeline améliore la collaboration et maintient l'acquisition de données fluide.
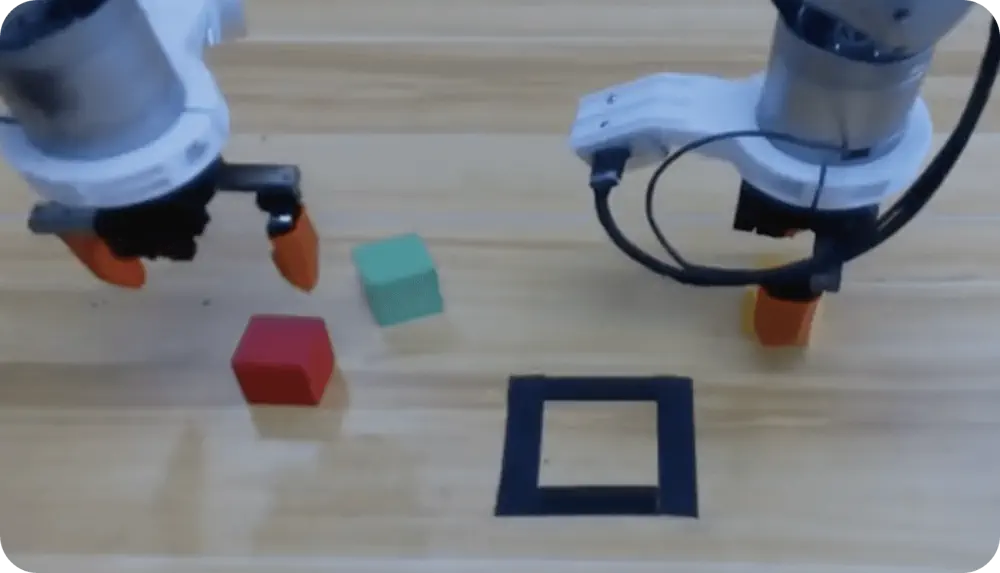
Prend en charge la capture de données sur plusieurs plateformes robotiques et configurations d'effecteurs finaux. Une forte standardisation transforme les entrées de divers appareils en ensembles de données cohérents et de haute qualité prêts pour l'entraînement grâce à un flux de travail de bout en bout.
Conçu pour coordonner des centaines de robots effectuant une collecte de données synchronisée. Avec des services à haute concurrence et une planification équilibrée de la charge, la plateforme ingère et traite de manière fiable de grands flux de données en temps réel.
Construit sur une base de services hautement disponible pour soutenir une collecte fiable 24/7. La large compatibilité des formats permet d'utiliser directement les sorties ou de les convertir en formats d'entraînement largement adoptés, accélérant ainsi les cycles de R&D.
-
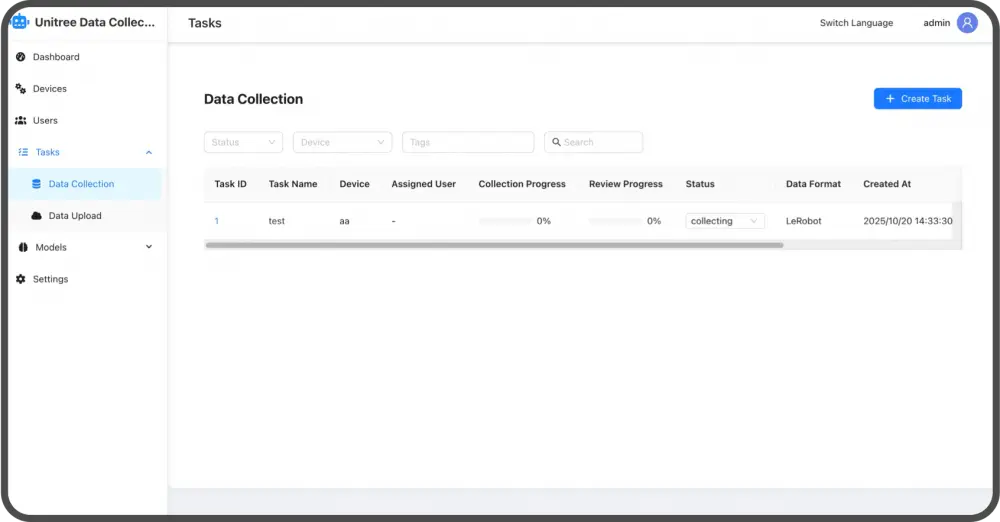
1Créer de Nouvelles
Tâches de Collecte
de Données -
2Mises à Jour
et
Attribution des Tâches -
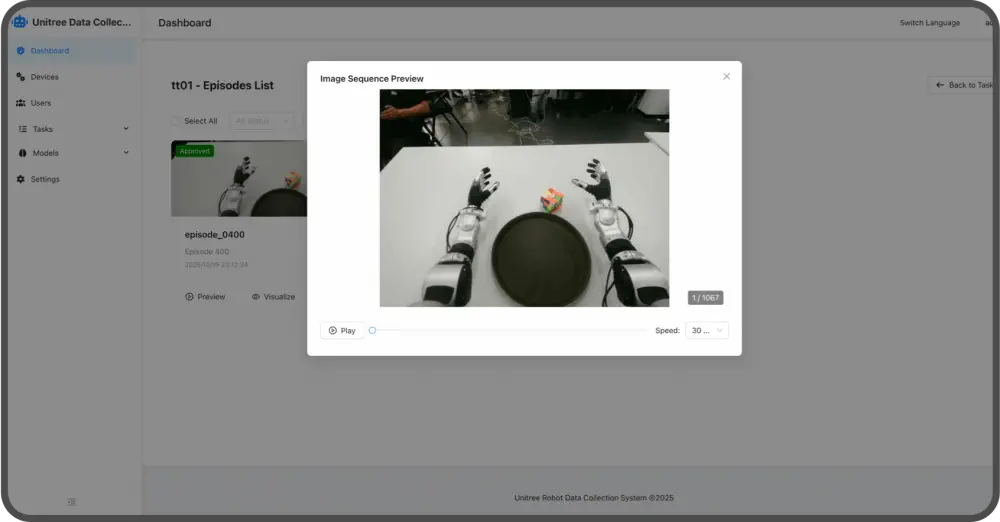
3Capture de Données
et
Annotation -
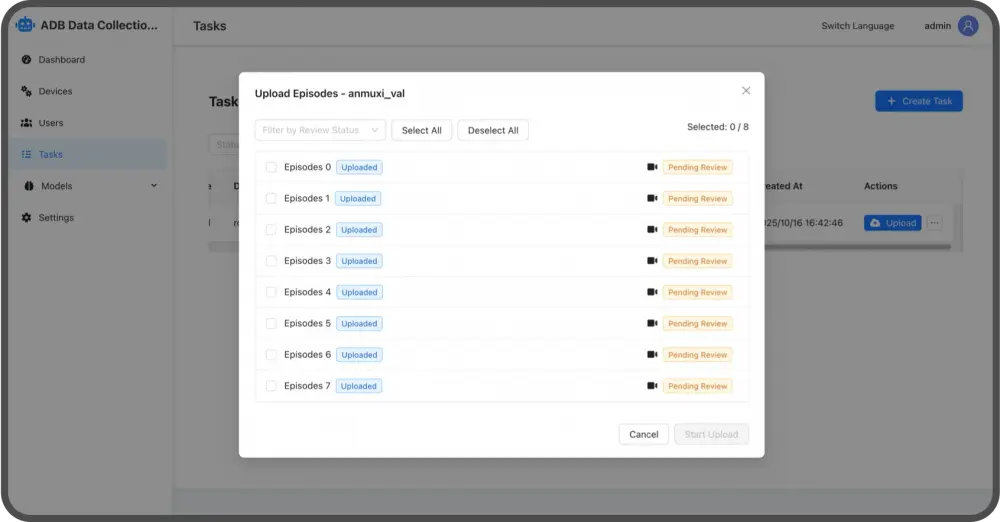
4Téléchargement
et Révision des Données -
5Archivage des Données
-
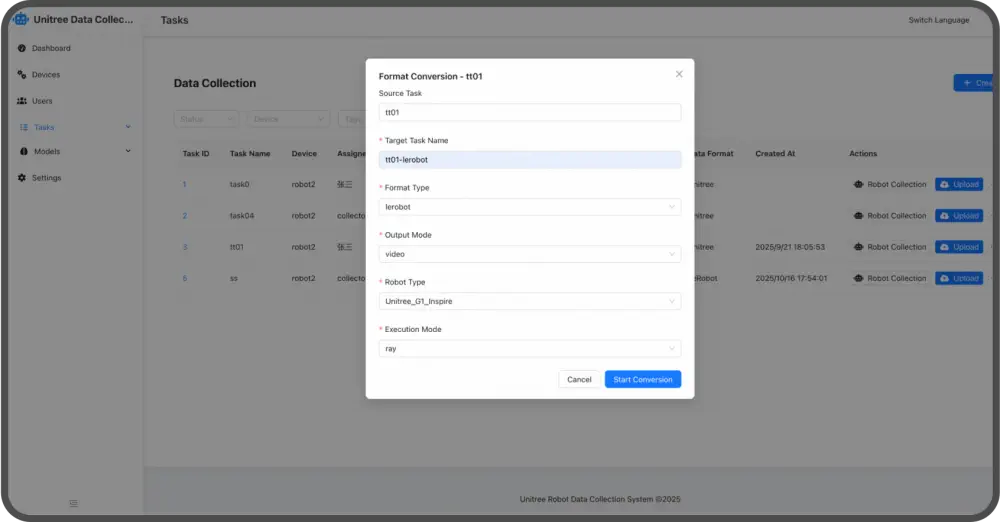
6Exportation des Ensembles de Données
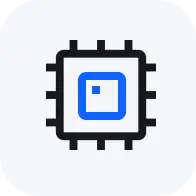
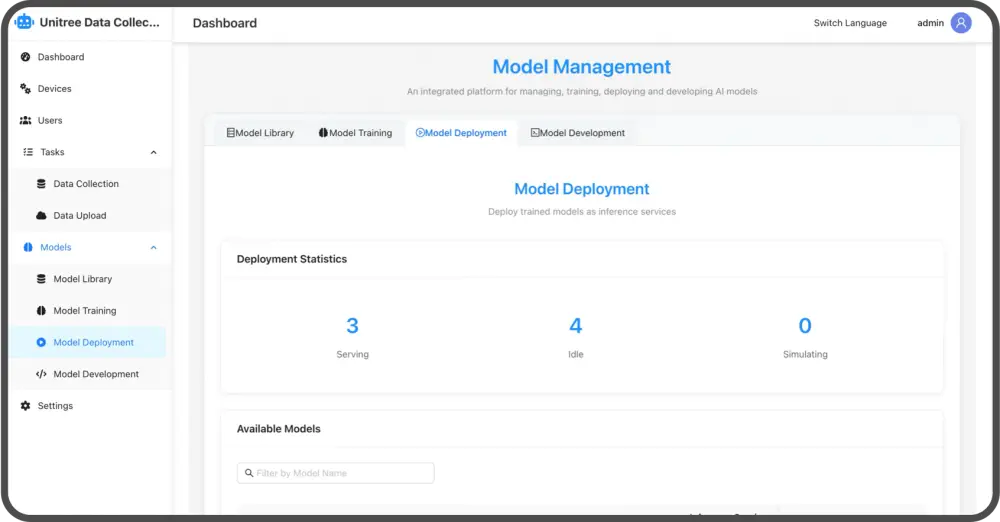
Couvre le flux de travail complet de la préparation des données au déploiement en un clic. La plateforme s'intègre parfaitement avec les cadres de modèles robotiques open-source largement utilisés.
Un écosystème de modèles ouvert avec des ensembles de données communautaires intégrés et un support pour la formation sur des ensembles de données open-source. Il offre également une intégration profonde avec les principaux modèles open-source tels que PI et GROOT.

Inclut une bibliothèque d'actifs 3D de haute fidélité et haute précision. En construisant des scènes de simulation réalistes, il produit rapidement des plans d'évaluation complets pour soutenir la vérification des algorithmes.

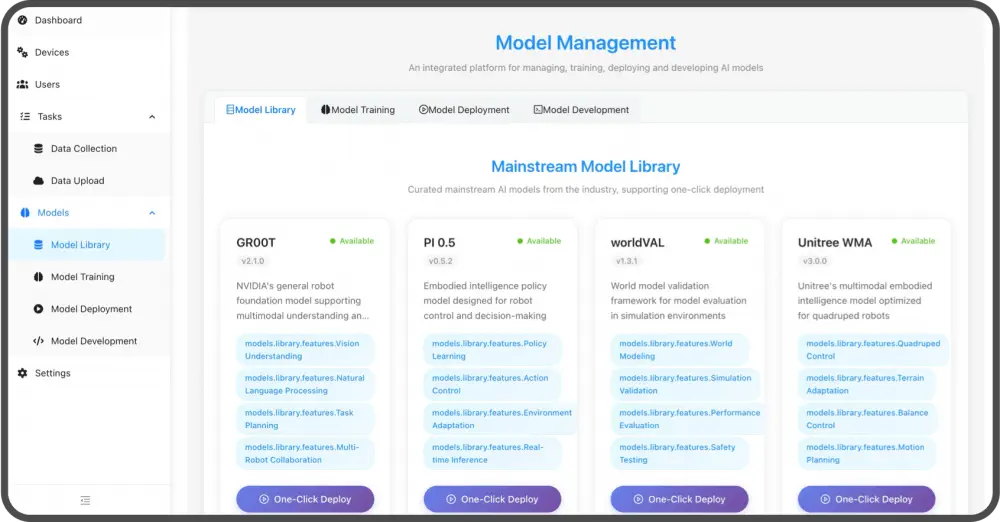
Prêt à être déployé immédiatement, réduisant le temps de configuration. Lancez le développement avec une "formation en un clic", utilisez la simulation intégrée pour une évaluation fiable et passez en douceur des algorithmes aux machines réelles.
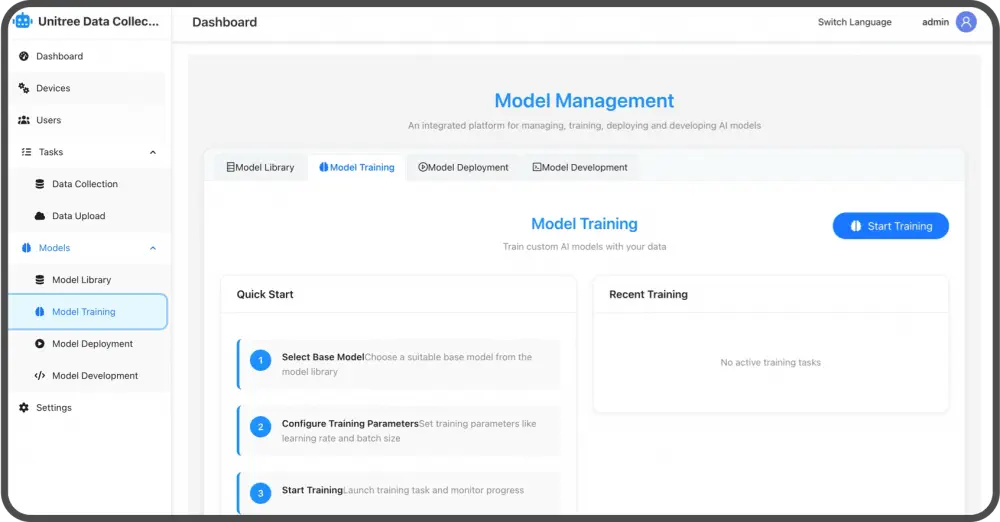
Construit sur une pile de formation distribuée haute performance, permettant une planification élastique des tâches et une accélération parallèle. Il s'adapte dynamiquement aux ressources disponibles, atteignant jusqu'à 90% d'utilisation du GPU.
-
1Choisir
L'Architecture
du Modèle -
2Configurer
la Formation -
3Surveillance
En Direct de la Formation -
4Ajustement
des Paramètres -
5Exécuter les Tests
de Simulation -
6Exporter et Déployer
le Modèle
Scénario d'Application

Service

Vie

Commerce

Industrie
Un Cadre Ouvert de Modèle-Monde-Action (WMA)
Génération d'Actions Guidée par
Prédiction Précise

Retour d'Information de Haute Fidélité pour la Synthèse
de Données
Inclus
| • | Robot G1-D-U7 (base à roues bras double) |
| • | Batterie intelligente (libération rapide) 9000mAh |
| • | Chargeur unité principale 54V 5A |
| • | Télécommande portative |
| • | Châssis à base de roues avec batterie intégrée 30Ah |
| • | Station de charge du châssis 51V 10A |
| • | Mains habiles Dex3-1 à trois doigts contrôlées par force (sans tactile; inclut caméra RGB) x2 |
Le contenu du colis varie selon la configuration.
| • | 1260 × 525 × 570 mm |
| • | 1680 × 525 × 570 mm |
| • | Env. 80kg |
Les valeurs indiquées sont les dimensions globales à la hauteur minimale et maximale de la colonne.
| • | Mains habiles Dex3-1 à trois doigts (sans retour tactile) |
| • | Châssis à base de roues motorisé (batterie intégrée) |
| • | Jetson Orin NX 16GB (100TOPS) |
| • | LiDAR / Caméras de profondeur / Capteurs de collision (Ultimate) |
[1] La charge maximale du bras varie considérablement selon les postures d'extension du bras.
[2] Pour la sélection de l'effecteur final, veuillez contacter notre équipe commerciale.
[3] Pour plus d'informations, veuillez lire le manuel de développement secondaire.