









Inclus dans ce forfait
- 1 X RB-Unt-237 - Unitree Dex1-1 V1 Main pour Unitree H2 (gauche)
- 1 X RB-Unt-240 - Unitree Dex1-1 V1 Main pour Unitree H2 (droite)
Description
- Unitree Dex1-1 V1 Main pour Unitree H2 (Paire)
- Pour le robot humanoïde Unitree H2
La Unitree Dex1-1 V1 Main pour Unitree H2 (Paire) offre une pince conçue avec précision spécifiquement pour le robot humanoïde Unitree H2. En tant que version standard de la série Dex1-1, cette unité assure une performance fiable et une grande polyvalence pour une large gamme d'applications robotiques. Elle est idéale pour les tâches nécessitant une préhension de base, la manipulation et le développement expérimental en robotique.
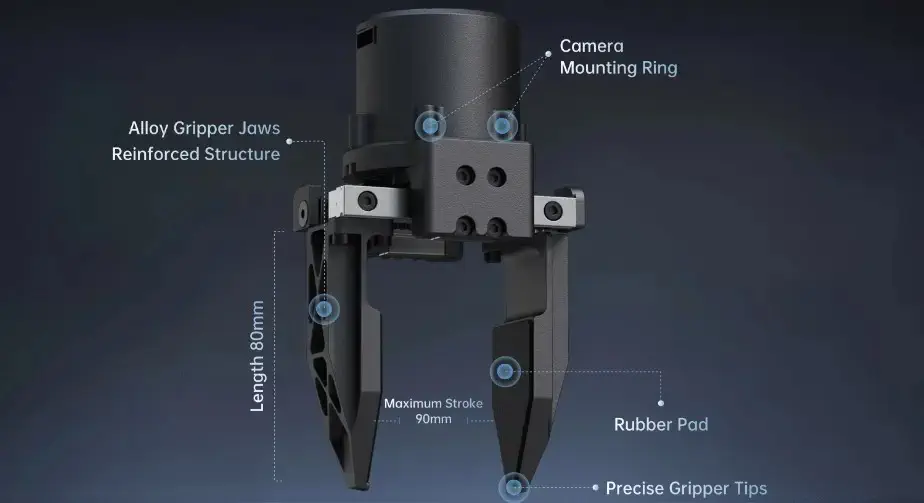
Ce paquet comprend une pince Dex1-1, un support de montage pour caméra D405 (caméra non incluse) pour une intégration flexible des capteurs, une carte de conversion 485 vers USB, ainsi que tous les câbles et accessoires nécessaires. Ces mains sont également équipées d'interfaces robotiques favorables au développement, permettant un développement secondaire et une personnalisation pour des projets de recherche ou éducatifs.
- 1x Unitree Dex1-1 V1 Main pour Unitree H2 (Droite)
- 1x Unitree Dex1-1 V1 Main pour Unitree H2 (Gauche)
Remarque : Ceci est une pièce de réparation auto-développée et ne peut pas être achetée séparément ; elle doit être commandée avec une unité H2.

- 143 x 78 x 67 mm (L x L x H)
- Longueur de la mâchoire : 80 mm
- Course : 90 mm
- Force de préhension (Réglable) : 5~120N
- Vitesse (Réglable) : 50~375 mm/s
- Résolution de position (Bout des doigts) : 0,1 mm
- Charge de préhension (Adaptation de forme) : 20 kg
- Charge de préhension (Friction) : 5 kg
- Temps de fermeture le plus court en pleine course : 0,24s
- Protocole de communication : 485 haute vitesse
- Débit en bauds de communication : 6 Mbps
- Fréquence de contrôle de communication : 1000 Hz
- Tension de fonctionnement : 24 V ~ 64 V (24 / 48 V DC recommandé)
- Courant statique : 0,03 A
- Courant de ligne de crête : 3,5 A
- Couple de crête du moteur : 5 N.m
- Vitesse maximale du moteur : 27rad/s (avec alimentation 64 V)
- Environnement de fonctionnement recommandé : -20 °C ~ 60 °C
- Rapport de réduction du moteur : 1:25
- Résolution de l'encodeur du moteur : 15 bits
- Type d'encodeur du moteur : Encodeur absolu
- Retour d'état du moteur : Angle, Vitesse angulaire, Couple, Température
- Instruction de contrôle du moteur : Angle, Vitesse angulaire, Couple, Rigidité, Amortissement