
Description
- Bras de robot articulé à 5 axes à portée de 750 mm
- Montage facile des outils, pinces, capteurs, etc.
- Entièrement clos ; la pneumatique et le câblage passent à travers le bras
- Pince vendue séparément (voir options)
- Note: Il s'agit d'un article en commande spéciale. Les retours ne sont pas acceptés sur les articles de commande spéciale et de liquidation, sauf s'ils sont défectueux, auquel cas le produit peut être réparé ou remplacé à la discrétion de RobotShop.
Le Bras Robot Articulé 5 Axes R17 ST Robotics est un article peu coûteux approprié pour débuter dans la robotique. Il est rapide, précis, fiable et facile à programmer. Il a une longue portée et donc un espace de travail plus grand et beaucoup plus utile que des machines comparables. Certains R17 Mk1 en service effectuent 3 quarts de travail par jour depuis dix ans sans défaillance. Le R17 est un système de bras de robot autonome articulé verticalement à cinq axes, conçu pour être une solution rentable pour les processus nécessitant une longue portée ou d'accès difficile. Les applications comprennent les essais de produits, la manipulation des échantillons, la manipulation des pièces, l'alimentation de machine, la soudure, la pulvérisation, la mesure acoustique et beaucoup plus. Il est facile à installer et à programmer, tout en étant capable d'assumer les tâches les plus complexes. Notez que le seul élément non inclus est une pince, étant donné que le choix de la pince dépend souvent de l'application. Voir les options de pince ci-dessous.

Le Mk5 utilise de nouveaux moteurs hybrides pas à pas à micro-pas intelligents, de poids léger, à haute vitesse et efficacité, à la fois pour la puissance et la vitesse et pour une précision de faible vitesse en cas de besoin. Chaque mouvement du robot est contrôlé par les encodeurs, qui empêchent tout mouvement lors d'une collision ou d'un autre problème. L'ensemble Mk5 comprend le nouveau contrôleur Mk5 qui est, comme indiqué plus haut, simple et fiable. Il utilise un couplage entre les micro-processeurs CPU et DSP et les dispositifs d'entraînement MOSFET compacts. Le logiciel embarqué ROBOFORTH II vous permet de démarrer facilement, tout en vous permettant de programmer les mouvements, les interfaces et les périphériques les plus complexes, assisté du gestionnaire de projet ROBWIN qui rassemble tout sur un seul écran Windows. Toutes les personnes qui utilisent ce système s'accordent à penser qu'il s'agit du logiciel de robot le plus flexible sur la planète. Ce sera pour vous un plaisir de l'utiliser.

Caractéristiques :
- Logiciel convivial, commandes en langue anglaise
- Montage facile des outils, pinces, capteurs, etc.
- Entièrement clos ; la pneumatique et le câblage passent à travers le bras, ne sont pas attachés à l'extérieur
- Complet : avec contrôleur, logiciel, manuels à l'écran, câbles, etc. Prêt à fonctionner
- Pinces pneumatiques ou électriques, ramassage à vide, changeurs d'outils et détection de collision en option
- Chiens de garde d'encodeurs incrémentaux
- Le R17 est livré prêt à fonctionner – robot, contrôleur, tous les câbles, gestionnaire de projet Windows GUI, teach pad
- Manuels à l'écran
- Piste linéaire, extension E/S, bluetooth teachpad et TCP/IP en option
Options (vendues séparément, veuillez nous contacter pour un devis)
Encodeurs
Sans encodeurs, le R17 fonctionne en boucle ouverte avec précision, indéfiniment et sans erreur, grâce à des dispositifs d'entraînement à micro-pas et une transmission exacte. Mais si le robot subit une collision, le contrôleur n'est pas informé et il poursuit le programme, même si le robot est hors de position. Habituellement, ces collisions se produisent seulement accidentellement lors de la programmation et rarement pendant le fonctionnement normal. Il est nécessaire d'exécuter la routine de calibrage après une telle collision. Avec l'option encodeur, le contrôleur remarque la différence immédiatement, arrête le robot et annonce une erreur.
Si l'option encodeur n'est pas installée, une solution de logiciel est fournie sous la forme d'un contrôle d'étalonnage rapide qui peut être inclus dans chaque cycle ou n cycles du robot. Toute erreur est signalée et le système s'arrête.
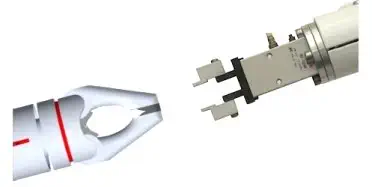
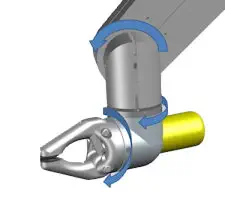
En standard, les robots sont équipés d'une bride de montage (voir schémas ci-dessous). Les effecteurs terminaux comprennent actuellement : pince électrique, pince pneumatique SMC 10 mm, ramasseurs à vide.
Remarque : la pince pneumatique est représentée avec des doigts spéciaux fabriqués pour une application particulière, qui ne sont pas inclus dans l'option. Des doigts adaptés au produit du client peuvent être fabriqués soit par le client, soit par ST.
Jusqu'à 3 m de longueur, utilisant un moteur puissant et deux roulements à rouleaux croisés à recirculation. Options de haute résolution ou de grande vitesse. Voir la vidéo
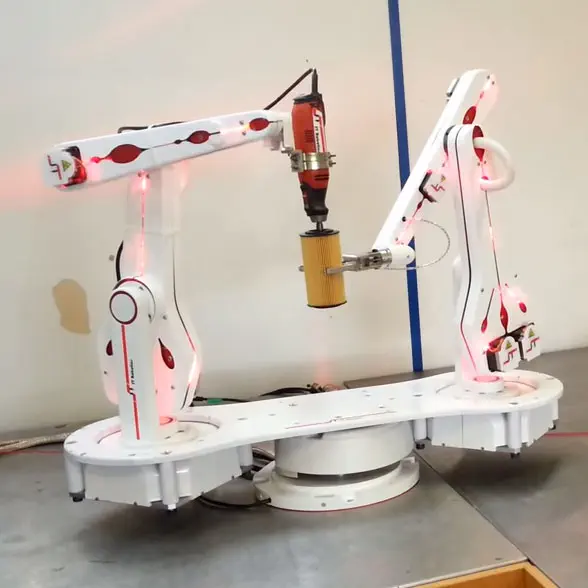
Comprend 2 robots R17 sur un carrousel programmable. Deux contrôleurs de robots sont reliés entre eux pour synchroniser les deux robots. Le nombre maximum d'axes au total est de 13. Vidéo disponible ici


Caractéristiques – version standard 5 et 6 axes
| Dispositifs d'entraînement : | Moteurs pas à pas hybrides à micro-pas à haute puissance chiens de garde d'encodeurs incrémentaux |
|
| Portée : | 750 mm/30 in dans toutes les directions ; rotation complète de la ceinture de 360 ° | |
| Charge utile (standard) : | nominale 1 kg, maximale 3 kg (4,4 lb) à la bride (la répétabilité et la vitesse diminuent avec l'augmentation de la charge utile et de la portée) |
|
| Répétabilité : | 0,2 mm (voir remarque) | |
| Conformité : statisme à 500 mm à charge nominale : statisme à portée maximale avec charge utile maximale : |
1,0 mm 6 mm |
|
| Vitesse maximale (dispositifs d'entraînement standard *) : | Taille 25 tr/min, épaule 15 tr/min, coude 21,66 tr/min, main et poignet 53,33 tr/min, roulis du 6e axe 55 tr/min (environ 800 mm/s) |
|
| Couple maximal pour le tangage ou roulis de la main : (tangage et lacet de la main dans la version avec 6e axe) |
2 N m (la répétabilité diminue avec l'augmentation du couple). | |
| Couple maximal pour le roulis du 6e axe : | 0,4 N m | |
| Poids | Robot à 5 axes 22,0 kg/49 lb, robot à 6 axes 23,0 kg/52 lb, contrôleur 11,1 kg/25 lb | |
| Puissance : | 110/240 V CA 420 VA (contrôleur standard) | |
| Environnement : | IP 54A, 0 – 40 °C (gamme plus large en option) | |
| MTBF : | 20 000 heures (typiquement, plus d'un million de cycles) | |
| Finition : |
Revêtement en plastique ABS blanc peint à la poudre plus formé sous vide. |
Spécifications – Version avec charge utile plus élevée (veuillez nous contacter pour un devis)
| Dispositifs d'entraînement : | Moteurs pas à pas hybrides à micro-pas à haut couplage chiens de garde d'encodeurs incrémentaux |
|
| Portée : | 750 mm/30 in dans toutes les directions ; rotation complète de la ceinture de 360 ° | |
| Charge utile : | Nominale 3 kg, maximale 5 kg à la bride (la répétabilité et la vitesse diminuent avec l'augmentation de la charge utile et de la portée) |
|
| Répétabilité : | 0,2 mm (voir remarque) | |
| Conformité : statisme à 500 mm à charge nominale : statisme à portée maximale avec charge utile maximale : |
1,0 mm 8 mm |
|
| Vitesse maximale (dispositifs d'entraînement standard *) : | Taille 25 tr/min, épaule 15 tr/min, coude 21,66 tr/min, main et poignet 53,33 tr/min (environ 800 mm/s) | |
| Couple maximal pour le tangage ou le roulis de la main : | 5 N m | |
| Poids | Robot 23,1 kg/52 lb, contrôleur 11,1 kg/25 lb | |
| Puissance : | 110/240 V CA 420 VA (contrôleur standard) | |
| Environnement : | IP 54A, 0 – 40 °C (gamme plus large en option) | |
| MTBF : | 20 000 heures (typiquement, plus d'un million de cycles) | |
| Finition : | Revêtement en plastique ABS blanc peint à la poudre plus formé sous vide. |
Spécifications – Version à vitesse plus élevée (veuillez nous contactez pour un devis)
| Dispositifs d'entraînement : | Servomoteurs CA de pointe avec moteurs pas à pas hybrides sur les axes 4 + 5 chiens de garde d'encodeurs incrémentaux |
|
| Portée : | 750 mm/30 in dans toutes les directions ; rotation complète de la ceinture de 360 ° | |
| Charge utile : | Nominale 3 kg, maximale 5 kg à la bride (la répétabilité et la vitesse diminuent avec l'augmentation de la charge utile et de la portée) |
|
| Répétabilité : | 0,2 mm (voir remarque) | |
| Conformité : statisme à 500 mm à charge nominale : |
1,0 mm |
|
| Vitesse maximale : | Taille 50 tr/min, épaule 30 tr/min, coude 60 tr/min, main et poignet 100 tr/min | |
| Couple maximal pour le tangage ou le roulis de la main : | 10 N m | |
| Poids | Robot 22,5 kg/50 lb, contrôleur 11,1 kg/25 lb | |
| Puissance : | 110/240 V CA 420 VA (contrôleur standard) | |
| Environnement : | IP 54A, 0 – 40 °C (gamme plus large en option) | |
| MTBF : | 20 000 heures (typiquement, plus d'un million de cycles) | |
| Finition : | Revêtement en plastique ABS blanc peint à la poudre plus formé sous vide. |