








Description
- LimX Dynamics TRON 2 EDU Robot à Deux Bras Incarné
- Deux bras avec 7 degrés de liberté et une portée de 70 cm, conception de poignet sphérique semblable à celui d'un humain
- Charge utile combinée de 10 kg avec 5 kg par bras étendu et précision de positionnement répétée de ±0,5 mm
- Téléopération VR via Oculus Quest 3 avec une latence de 100 ms et protection active des limites de sécurité
- Module de calcul AI Intel Core i7-1165G7 avec 2 To de stockage et support ROS1/ROS2
- Plateforme VLA native avec modèles classiques ACT/Pi 0,5 et plus de 10 000 ensembles de données réels en open source
- SDK Python et C++ avec compatibilité avec les simulateurs NVIDIA Isaac Sim, MuJoCo et Gazebo
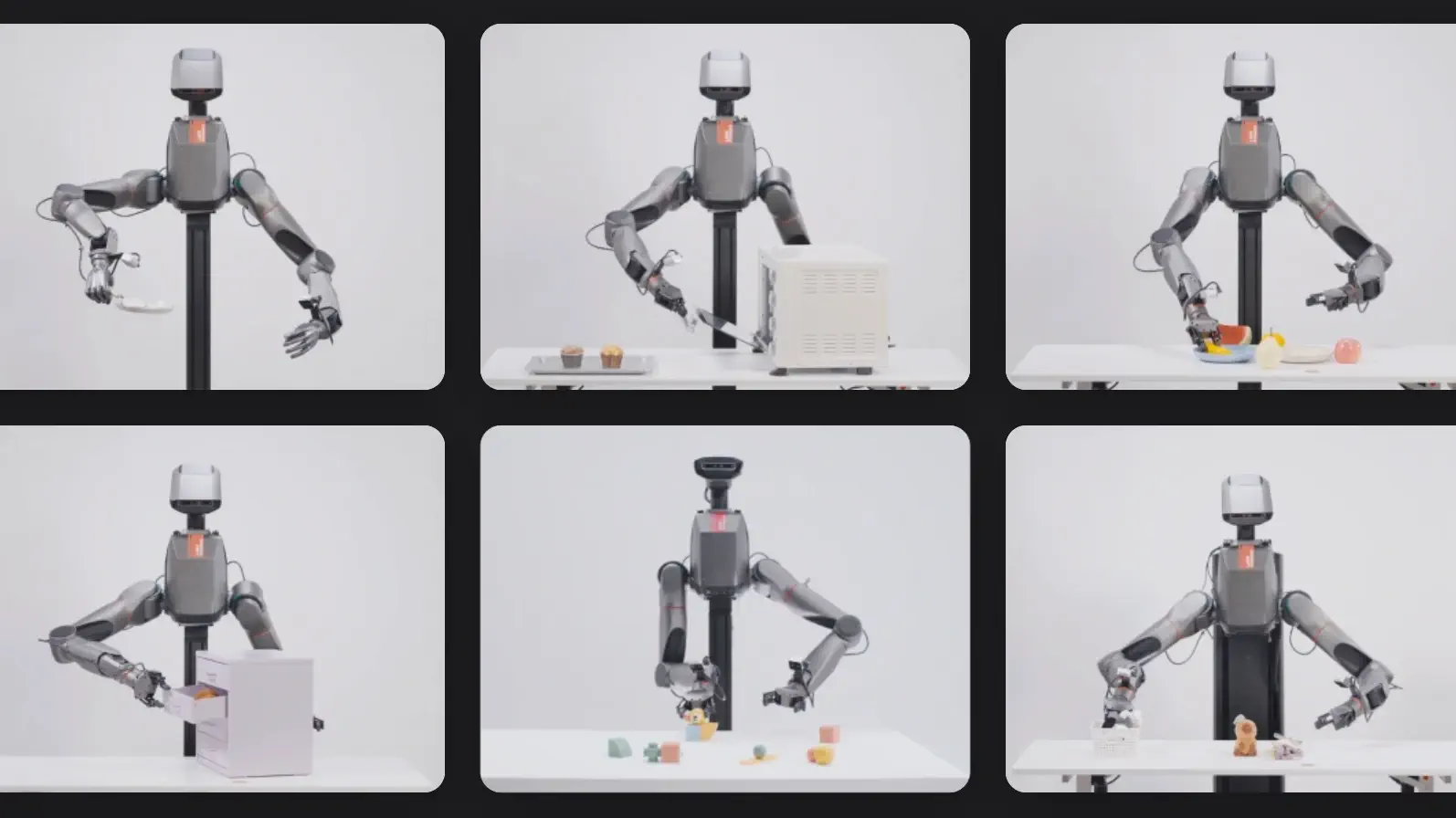
Le TRON 2 EDU Robot modulaire à deux bras est une plateforme de manipulation à deux bras haute performance développée par LimX Dynamics, spécialement conçue pour la recherche Vision-Langage-Action, la collecte de données téléopérées et le développement de tâches bimanuales. Chaque bras dispose de sept degrés de liberté avec une conception de poignet sphérique qui permet une articulation à large portée sur l'ensemble de l'espace de travail de 70 cm, produisant des postures naturelles et un placement précis de l'effecteur final pour des tâches de manipulation complexes. La protection active des limites de sécurité couvre les zones de la tête, du corps, du support et du bureau, tandis qu'une conception d'alimentation redondante double maintient les modules de bras dans un état sécurisé verrouillé en cas de perte de puissance inattendue. Adapté aux laboratoires de recherche académique, aux équipes de développement AI et aux programmes d'ingénierie robotique axés sur la manipulation, le contrôle habile et l'apprentissage incarné.
La perception est gérée par des caméras RGB-D positionnées à la tête et au poignet, offrant une couverture visuelle complète de l'espace de travail de manipulation pour un retour d'information en boucle fermée précis lors des opérations autonomes et téléopérées. Le contrôle à deux bras basé sur la VR via Oculus Quest 3 offre une opération à distance à faible latence, permettant un enregistrement efficace de démonstrations de trajectoire de haute qualité pour les flux de travail d'apprentissage par imitation. La plateforme de développement VLA intégrée consolide la collecte de données, l'annotation, l'entraînement de modèles et l'inférence en une seule interface rationalisée, avec une grande bibliothèque d'ensembles de données open source et de modèles classiques, y compris ACT et Pi 0,5, disponibles immédiatement. Avec un SDK entièrement ouvert, une compatibilité ROS1/ROS2 et un support pour NVIDIA Isaac Sim, MuJoCo et Gazebo, cette plateforme robotique autonome est conçue pour servir les chercheurs, les laboratoires universitaires et les organisations de développement accélérant les progrès en AI incarnée et manipulation habile.

Produits authentiques avec couverture de garantie approuvée par le fabricant.

Douanes, inspection et préparation gérées localement avant expédition.

Ventes, support et retours gérés par une seule équipe.

Docs, tutoriels et réponses communautaires pour avancer plus vite.



Une plateforme de recherche à deux bras dédiée combinant un matériel de manipulation de précision avec un écosystème de développement AI complet pour l'entraînement de modèles VLA et l'exécution de tâches habiles.
Chaque bras avec 7 degrés de liberté offre une articulation à large portée avec un poignet sphérique pour la génération de postures naturelles sur un espace de travail de 70 cm. Les algorithmes de mouvement de pointe de l'industrie offrent un contrôle stable et équilibré lors de tâches de manipulation bimanuales et à un seul bras complexes.
La plateforme intégrée consolide la collecte de données, le nettoyage, l'annotation, l'entraînement de modèles et l'inférence en une seule interface unifiée. Les modèles classiques, y compris ACT et Pi 0,5, sont préchargés aux côtés de plus de 10 000 ensembles de données réels en open source pour une utilisation immédiate.
Les caméras aux positions de la tête et du poignet offrent une couverture visuelle complète de l'espace de travail de manipulation pour un retour d'information en boucle fermée lors de l'exécution de tâches téléopérées et autonomes. L'agencement en champ complet élimine les angles morts sur toute la plage de mouvement du bras.
Les SDK Python et C++ offrent un accès complet au contrôle de haut niveau et de bas niveau avec une compatibilité ROS1 et ROS2 et des modèles URDF clairs optimisés pour la performance Sim2Real. Le support pour NVIDIA Isaac Sim, MuJoCo et Gazebo permet des flux de travail de développement axés sur la simulation.


| • | Corps Principal TRON2 (comprend deux bras supérieurs) |
| • | Extrémités Inférieures des Bras TRON2 ×2 (comprend deux pinces) |
| • | Unité de Tête TRON2 (tête de détection vision et audio) |
| • | Kit de Caméra D405 pour Poignet ×2 (comprend caméras, supports et câbles de données) |
| • | Batterie TRON2 et Station de Charge (comprend adaptateur secteur) |
| • | Télécommande |
| • | Kit Oculus Quest 3 (pour collecte de données et téléopération basées sur la VR) |
| • | Module d'Extension Dev |
| • | Kit d'Outils pour Deux Bras (outils d'assemblage spécifiques pour les bras) |
| • | Manuel d'Utilisateur et Certificat de Qualité |
| • | Support Fixe et Base Fixe (modèle DA, emballé séparément) |
Le contenu de l'emballage varie selon la configuration. La variante Mobile (DAU) inclut un Support Élévateur et un Châssis Mobile à la place du Support Fixe et de la Base. Confirmez le contenu final de la boîte avec les ventes avant de commander.
| • | 70 cm par bras |
| • | 85 mm (3,35 in) |
| • | 7 |
| • | Alliage d'aluminium et plastique |
Les dimensions globales du corps dépendent de la configuration du support de montage. Les valeurs indiquées proviennent de la référence du fabricant.