







Inclus dans ce forfait
- 1 X RB-Lyn-1230 - Lynxmotion SES-PRO 550mm 6Dof Modular Robotic Arm Sub Kit (SO)
- 1 X RB-Lyn-1233 - Lynxmotion SES-PRO 100-240VAC to 36VDC 30A Power Supply w/ Emergency Stop (SO)
Description
- Bras semi-professionnel modulaire, personnalisable et reconfigurable
- Facile à utiliser avec un protocole de communication lisible par l'homme
- Haute précision et capacité de charge utile compétitive
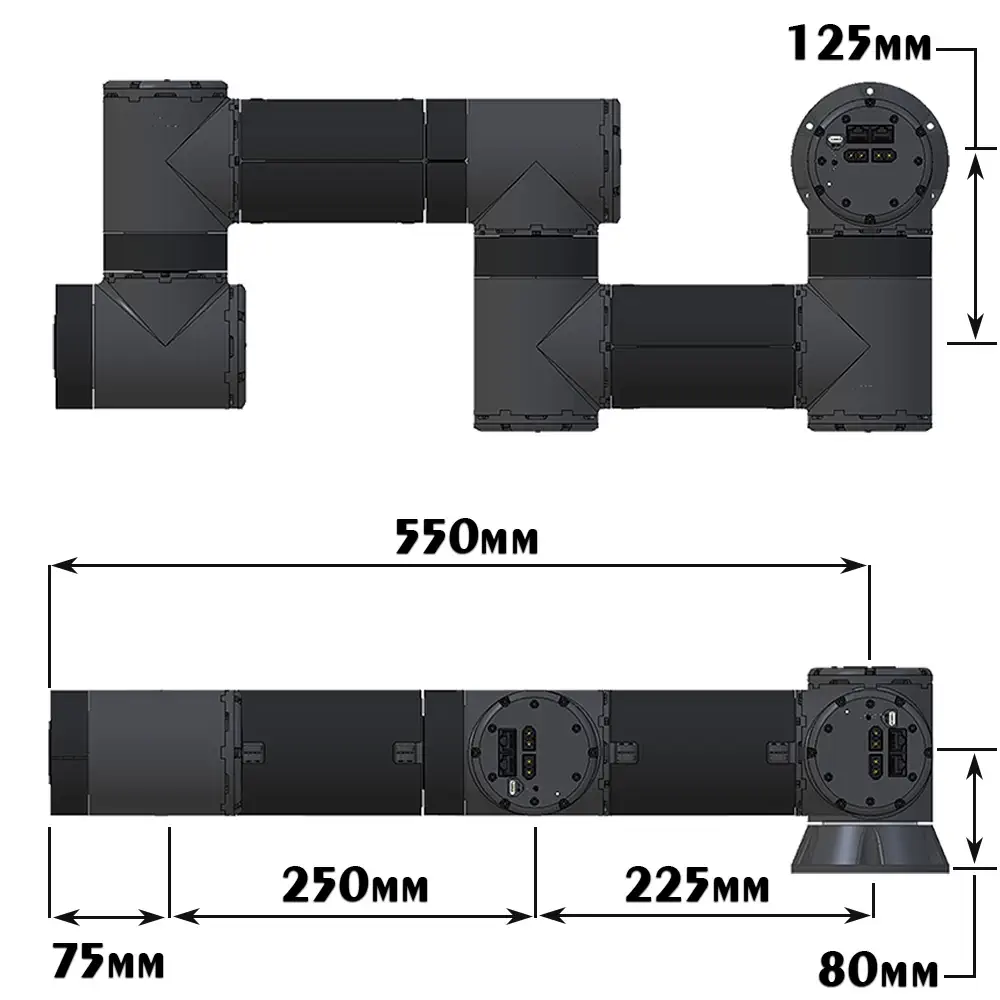
- Extension horizontale de 550mm
- Charge utile de 2kg et précision de ±0,1 mm à pleine portée
- Pince vendue séparément
![]()
Le Lynxmotion SES-PRO Kit de Bras Robotique Modulaire 550mm 6Dof offre une charge utile de 2Kg à pleine extension avec une précision de ±0,1 mm. Contrairement aux bras conçus à des fins spécifiques, celui-ci est conçu pour être modulaire et reconfigurable pour s'adapter à l'application de l'utilisateur. Des degrés de liberté supplémentaires peuvent être ajoutés, et les degrés de liberté existants peuvent être reconfigurés ou supprimés. La conception garantit qu'il n'y a pas de points de pincement évidents.

Lynxmotion SES-PRO Système de Construction Robotique Modulaire
Incorpore six actionneurs Lynxmotion Professional Smart Servo
- Engrenage à onde de contrainte
- Moteurs pas à pas NEMA
- Électronique intégrée
- Microcontrôleur
- Contrôleur de moteur
- Régulation de tension
- IMU (accéléromètre & gyroscope)
- Communication CAN
- Retour d'angle absolu
- Protocole de communication lisible par l'homme
- … plus

Pince DH-Robotics 2 & 3 Doigts montrée sur le Lynxmotion SES-PRO Kit de Bras 550mm 5Dof
Les bras robotisés modulaires Lynxmotion SES-PRO sont entièrement pris en charge par ROS2, offrant une intégration transparente aux utilisateurs souhaitant les intégrer dans divers projets robotiques. Ces bras sont conçus pour fonctionner avec le framework ROS2, permettant une communication, un contrôle et une personnalisation robustes via des outils et bibliothèques ROS2 standard. Une prise en charge complète de ROS2 est disponible via le référentiel GitHub officiel, où les utilisateurs peuvent accéder à des packages dédiés pour une configuration et un déploiement faciles. Cette compatibilité garantit une intégration fluide dans une large gamme d'applications, de la recherche et du développement aux tâches d'automatisation avancées.
- 3x Lynxmotion Smart Servo PRO Lite (LSS-P-L1)
- 3x Lynxmotion Smart Servo PRO Standard (LSS-P-S1)
- 4x Lynxmotion SES-PRO Pince en Aluminium pour Tubes CF 70mm
- 1x Lynxmotion SES-PRO Tube en Fibre de Carbone 118mm x 70mm
- 1x Lynxmotion SES-PRO Tube en Fibre de Carbone 143mm x 70mm
- 1x Lynxmotion SES-PRO Base pour Actionneurs LSS-P Lite ou Standard
- 1x Plaque d'Adaptation de Base de Bras Lynxmotion SES-PRO
- 2x Couvre-tubes en Néoprène de Marque Lynxmotion
- Alimentation 36V
- Câbles (USB, CAT5, Alimentation)
- Matériel de montage
Pince Compatible :
- Kit de Pince à Deux Doigts Lynxmotion SES-PRO DH Robotics PGE-50-40
- Kit de Pince à Trois Doigts Lynxmotion SES-PRO DH Robotics CGE-10-10
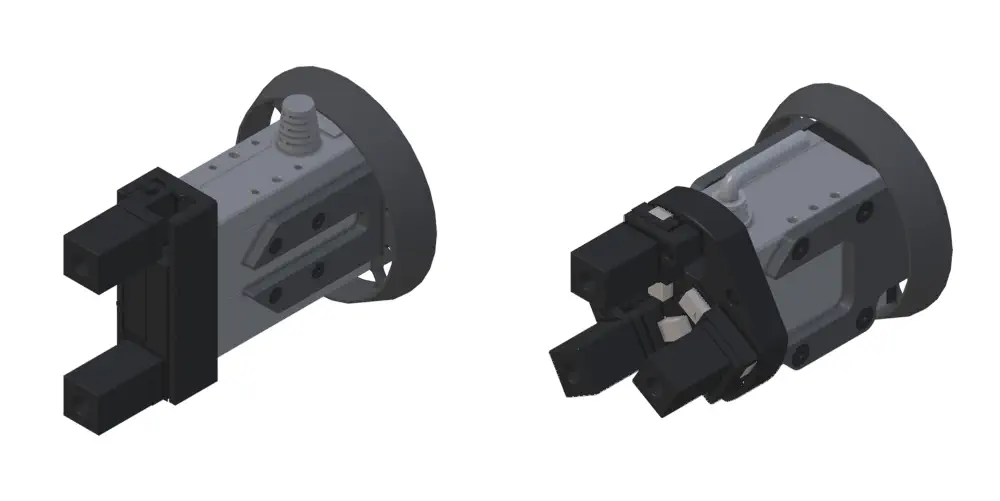
DH-Robotics Deux Doigts PGE-50-40 & Trois Doigts CGE-10-10
- Portée : 550mm
- Répétabilité : À venir
Sites Web
- SES-PRO Système de Robot Modulaire
- SES-PRO Bras Manipulateurs Robots
- Github SES-P-ROS2-Arms
- Github LSS-P-ROS2-Hardware
Wikis
- Lynxmotion SES-PRO 550mm 6 Dof Informations & Guides sur le Bras Robotique
- Lynxmotion SES-PRO Interface Utilisateur du Logiciel de Bras Robotique
Blog
- Un Aperçu du Système de Construction de Robots Modulaires Professionnels à Venir de Lynxmotion
- Les bras robotisés modulaires Lynxmotion PRO prennent désormais en charge ROS2 !
Connexes
- Système Modulaire & Bras Robotiques Lynxmotion SES-PRO
- Bras Robotiques Lynxmotion SES-PRO
Lynxmotion SES-PRO Pièces Modulaires Lynxmotion Servos Intelligents PRO
Général
- Portée horizontale : 550mm
- Portée verticale : 630mm
- Degrés de Liberté (DoF) : 6
- Charge utile : 2Kg (sans pince) à pleine portée
- Détection de collision : Non
Mécanique
- Portée verticale : 630mm
- Articulation 1 : S1 ±360° (jeu de câble)
- Articulation 2 : S1 ±180°
- Articulation 3 : S1 ±180°
- Articulation 4 : L1; ±180°
- Articulation 5 : L1; ±180°
- Articulation 6 : L1; ±180°(pince câblée) ou infini
- Moteurs : NEMA 17 & 24
- Engrenage : 100:1 Onde de contrainte (alias “Harmonic drive”)
Électrique
- Alimentation : 120V - 220V AC à 36V DC
- Bouton d'arrêt d'urgence & Fusible de protection
- Prise Type B (USA) (Câble d'alimentation standard)
- Alternative d'alimentation par batterie : 8 cellules (8S) ou 9 cellules (9S)
- Câblage : externe
Communication
- Méthode de communication entre servos : Bus CAN (personnalisé)
- Méthode de communication vers le premier servo : USB (USB 3 suggéré)
- Protocole de communication : LSS-P (lisible par l'homme)