















Description
- Leo Rover v1.8 (assemblé)
- Comprend un kit de robotique extérieur 4WD
- Open source et construit sur RaspberryPi
- Conçu pour être fiable, étanche et extensible
- Capacité de charge utile : env. 5 kg
- Diffusion vidéo et interface utilisateur de conduite prêtes à l'emploi
Le Leo Rover v1.8 (assemblé) comprend un kit robotique extérieur 4 roues motrices et est conçu pour être fiable, étanche et extensible.
Il utilise 4 moteurs à courant continu dans le moyeu avec un réducteur planétaire 73,2: 1 et un encodeur 12 CPR et entraîne sur 4 roues de 130 mm de diamètre et des pneus en caoutchouc avec insert en mousse (non pneumatiques).
")
La taille d'obstacle maximale estimée est de 70 mm lors d'une course d'environ 4 heures de conduite nominale. Pendant la diffusion vidéo en direct, vous pouvez vous connecter au Leo Rover jusqu'à une distance de 100 mètres. Sa caméra a une résolution de 5 MPx et utilise un objectif Fisheye avec un champ de vision de 160 degrés.
")
Par défaut, le Leo Rover est contrôlé à distance avec un flux vidéo et une interface utilisateur prêts à l'emploi. Il n'est pas autonome, mais il est prêt à l'être. Le logiciel est basé sur Ubuntu 20.04 et le Robot Operating System (ROS) qui est connu pour la facilité de mise en œuvre des fonctions d'autonomie et de semi-autonomie.
Le plus simple est d'ajouter une caméra lidar ou stéréovision pour améliorer l'autonavigation du Rover, puis de construire vos fonctionnalités par-dessus. Le Rover lui-même est équipé d'une caméra frontale et de 4 encodeurs de roue, ce qui lui permet de fournir un flux vidéo et une odométrie de base.
")
Veuillez noter : comme le fabricant travaille constamment à l'amélioration de la conception, le Rover que vous recevez peut sembler et agir un peu différemment de ce que l'on voit dans les vidéos et les démos.
- 1 x Leo Rover v1.8 (Assemblé)
- 1 x Chargeur de batterie
- 1 x Tournevis à tête hexagonale pour monter/démonter les modules supplémentaires
Accès au canal pivot Slack de la communauté officielle pour le support, le dépannage et l'aide aux intégrations.
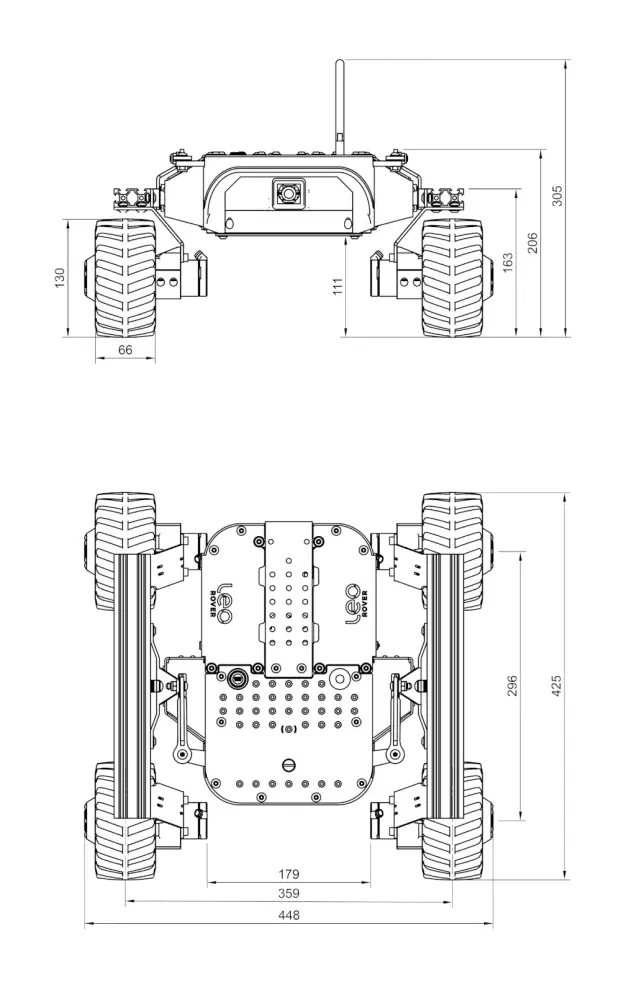
Taille
- Poids : 6,5 kg
- Taille : 448 x 425 x 305 mm
- Capacité de charge utile : env. 5 kg
Montage de la plate-forme supérieure Taille
- Taille : 299 x 183 mm
- Grille de trous : 18 x 15 mm
- Trous : 40 x Φ 7 mm + 22 x Φ 5,5 mm
Performance
- Taille d'obstacle maximale estimée : 70 mm
- Indice de protection : conforme à IP55 (non certifié)
- Autonomie : estimation de 4 heures de conduite nominale
- Portée de connexion : jusqu'à 100 m (avec flux vidéo en direct)
roues
- Moteurs : 4 x moteur CC intégré au moyeu avec réducteur planétaire 73,2:1 et encodeur 12 CPR
- Diamètre des roues : 130 mm
- Matériau du pneu : caoutchouc avec insert en mousse (non pneumatique)
Batterie
- Tension : 11,1 V CC
- Capacité : 5000 mAh
- Type : Li-Ion avec PCM interne Fonctions de sécurité contre les courts-circuits, les surintensités et les surcharges
- Max. courant : 8 A (total pour l'ensemble du Rover)
Appareil photo
- Résolution de la caméra : 5 MPx
- Objectif : Fisheye avec un champ de vision de 160 degrés (IR non filtré ; vision nocturne autorisée)
Réseau
- Point d'accès WiFi 2,4 GHz avec antenne externe
- WiFi 2,4 GHz + 5 GHz sur les antennes RPi internes pour la connectivité
Logiciel
- Système d'exploitation : LeoOS basé sur Ubuntu 20.04 + ROS Noetic. Prise en charge de ROS2
- Interface utilisateur prête à l'emploi située sous '10.0.0.1' lors de l'utilisation de l'image standard du logiciel Leo
- Micrologiciel open source
Électronique
- RaspberryPi 4B 2 Go (ou supérieur) comme ordinateur principal
- LeoCore comme microcontrôleur en temps réel : STM32F4 (@84MHz, 64KB RAM, 256KB Flash)
Vitesse
- Max. vitesse linéaire : env. 0,4 m/s
- Max. vitesse angulaire : env. 60 degrés/s
Interfaces de connexion - Disponibles en externe
- 1x prise microUSB étanche
- 1x Antenne RP-SMA Prise Mâle
- 1x prise d'alimentation Weipu SP13 12V à 3 broches
Interfaces de connexion - Interfaces ouvertes internes
- RaspberryPi : 2x USB, 20x GPIO, Ethernet RJ45, 1x port d'affichage RPi, Bluetooth 5.0 avec BLE
Manette
- Vous avez besoin d'un appareil compatible Web pour accéder à l'interface utilisateur stock sous "10.0.0.1" dans votre navigateur.
- Configuration requise pour l'appareil : Windows/Linux/Android/macOS
- Pour un développement plus facile, ROS sur votre appareil est fortement recommandé.