













Description
- 4 roues motrices
- Facile à assembler
- Structure en alliage d'aluminium
- Vitesse : 0,6 m/s
- Se déplace dans n'importe quelle direction sans changer l'orientation
- Vient assemblé avec seulement les roues détachées
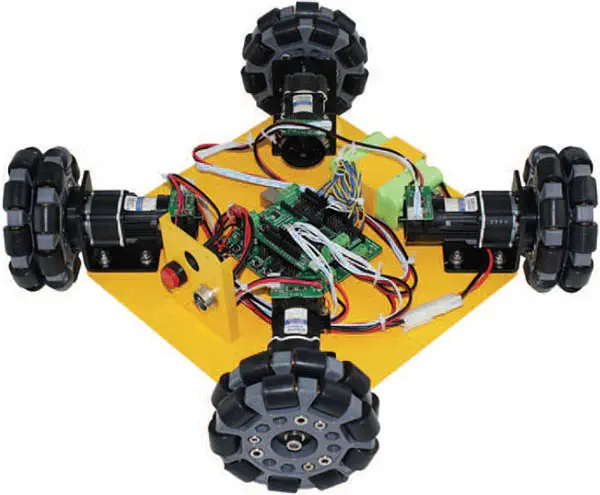
Nexus Robot présente le Kit Robotique Mobile à 4 Roues Motrices Omnidirectionnelles Compatible Arduino. Il comprend un microcontrôleur, une extension E/S, un moteur CC avec un encodeur ; en faisant varier la vitesse et la direction de chaque roue, il peut se déplacer dans n'importe quelle direction sans changer son orientation. Il s'agit d'un kit d'apprentissage qui vous permettra de découvrir et profiter du plaisir du déplacement omnidirectionnel.
Les roues omnidirectionnelles sont extraordinaires, car elles sont capables de rouler librement dans deux directions. Elles peuvent soit rouler comme des roues normales, soit rouler latéralement, en fonction des circonstances. Les roues omnidirectionnelles permettent de convertir un robot non-holonome en un robot holonome. Un robot non-holonome qui utilise des roues normales dispose de seulement 2 des 3 degrés de liberté contrôlables : le déplacement avant/arrière et la rotation. Ne pas être capable de se déplacer de façon latérale rend un robot plus lent et moins efficace pour atteindre un objectif donné. Les roues omnidirectionnelles holonomes permettent de surmonter ce problème, car elles sont très faciles à manoeuvrer. Contrairement au robot normal non-holonome, le robot omnidirectionnel holonome peut se déplacer dans une direction arbitraire de façon continue, sans changer la direction des roues. Il peut se déplacer en avant et en arrière, latéralement, et tourne sur place.
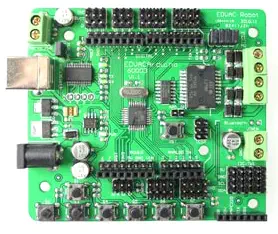
Carte microcontrôleur Arduino 328
C'est une carte microcontrôleur basée sur l'Arduino 168. Elle est dotée de 14 broches d'entrée/sortie numériques (dont 6 peuvent être utilisées comme sorties MID), de 8 entrées analogiques, d'un oscillateur à quartz de 16 MHz, d'une connexion USB, d'une prise de courant, d'une embase ICSP et d'un bouton de réinitialisation. Elle contient tout ce qui est nécessaire pour prendre en charge le microcontrôleur. Pour cela, branchez-la à un ordinateur au moyen d'un câble USB ou alimentez-la au moyen d'une batterie ou adaptateur CC/CA pour démarrer.
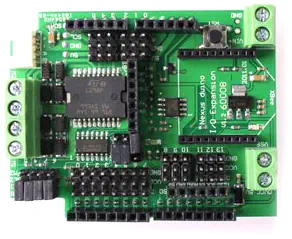
Extension E/S Arduino
Nexus Robot fournit l'extension fonctionnelle ultime pour la carte d'extension E/S Arduino V1.2 et vous procure une facilité supplémentaire pour connecter des périphériques tels que des capteurs, des servomoteurs et des dispositifs RS485. Cette carte d'extension pour capteur permet de raccorder facilement un grand nombre de capteurs parmi les plus couramment utilisés.
- Roue omnidirectionnelle 100 mm X 4
- Moteur CC avec encodeur X 4
- Microcontrôleur X 1
- Carte d'extension E/S X 1
Châssis :
- Forme : carrée
- Largeur maximale : 402 mm
- Hauteur : 100 mm
- Hauteur du châssis : 21 mm
- Base des roues : 260 mm
- Mode couplé : compaction
- Matériau : alliage d'aluminium
- Couleur : jaune, noir
- Vitesse : 0,6 m/s
- Mode d'entrainement : 4 roues motrices
- Angle de franchissement : 20 degrés
- Charge utile : 10 kg
- Compatible PC104 : oui
Roue :
- Type : omnidirectionnelle à 90 degrés
- Diamètre : 100 mm ou 123 mm
- Épaisseur : 38 mm
- Matériau : Polyuréthane
- Charge utile : 20 kg
- Diamètre du rouleau : 19 mm
- Longueur du rouleau : 19 mm
- Mode couplé : tube d'aluminium ou roulements