





Description
- Gravity: HUSKYLENS avec Plateforme de Robot Mobile Devastator Tank & Romeo V2
- Inclut un capteur de vision par machine AI avancé et une plateforme de robot mobile polyvalente
- Se connecte sans problème avec Arduino, micro:bit, Raspberry Pi et LattePanda via UART/I2C
- Caractérisé par un écran IPS de 2,0 pouces, éliminant le besoin d'un PC pendant le réglage des paramètres
- Reconnaît les visages, les objets, les couleurs, les lignes et les codes QR avec la technologie d'apprentissage automatique
- Améliore les projets robotiques avec le contrôle par gestes, l'accès intelligent et les capacités interactives
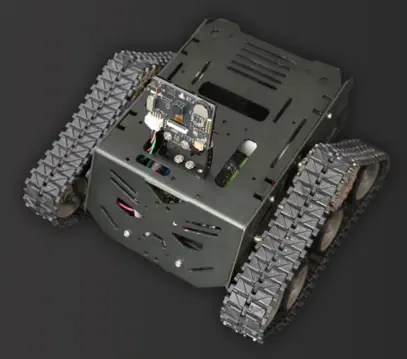
Le Gravity: HUSKYLENS avec Plateforme de Robot Mobile Devastator Tank & Romeo V2 comprend un capteur de vision par machine AI avancé, une plateforme de robot mobile polyvalente et une carte de robot basée sur Arduino avec un pilote de moteur. Le capteur HUSKYLENS est conçu pour une facilité d'utilisation et est équipé de multiples fonctionnalités telles que la reconnaissance des visages, le suivi des objets, la reconnaissance des objets, le suivi des lignes, la reconnaissance des couleurs et la reconnaissance des codes QR. Il se connecte sans problème avec des cartes de contrôle principales populaires comme Arduino, micro:bit, Raspberry Pi et LattePanda via les ports UART/I2C, facilitant la création de projets innovants sans avoir besoin d'algorithmes complexes.
Le capteur HUSKYLENS est caractérisé par un écran IPS de 2,0 pouces, éliminant le besoin d'un PC pendant le réglage des paramètres. Il utilise la technologie d'apprentissage automatique pour reconnaître les visages et les objets, et il peut continuellement apprendre de nouveaux éléments sous différents angles et portées, améliorant sa précision au fil du temps. Le capteur est alimenté par la puce AI Kendryte K210, qui offre des performances 1 000 fois plus rapides que le STM32H743 lors de l'exécution d'algorithmes de réseaux neuronaux, lui permettant de capturer efficacement des objets en mouvement rapide.
Cette technologie ouvre de nouvelles possibilités pour des projets interactifs, tels que le contrôle par gestes, les robots autonomes, le contrôle d'accès intelligent et les jouets interactifs. Le HUSKYLENS peut apprendre des gestes spécifiques et reconnaître les motifs de mouvement de la main, fournissant des données pour la création de projets interactifs attrayants. Il simplifie également le suivi des lignes en apprenant et en suivant de nouvelles lignes avec une simple pression de bouton, évitant ainsi le besoin d'ajustements de paramètres fastidieux.
Le HUSKYLENS peut servir de "yeux" aux robots, leur permettant de reconnaître les utilisateurs, de comprendre les commandes de gestes de la main et d'aider à organiser les tâches. Ce capteur innovant améliore considérablement les capacités des projets robotiques, rendant les interactions et les fonctionnalités complexes plus accessibles et agréables à mettre en œuvre.
- 1x Carte principale HuskyLens
- 1x Plateforme de Robot Mobile Devastator Tank
- 1x Romeo V2 - une carte de robot Arduino (Arduino Leonardo) avec pilote de moteur
- 6x Vis M3
- 6x Écrous M3
- 1x Support de montage petit
- 1x Support de rehaussement
- 1x Câble de capteur Gravity à 4 broches
- 52 x 44,5 mm
- 2,05 x 1,75 pouces
- Processeur: Kendryte K210
- Capteur d'image: OV2640 (Caméra de 2,0 mégapixels)
- Tension d'alimentation: de 3 à 5,0V
- Consommation de courant (typique): 320mA à 3,3V, 230mA à 5,0V (mode de reconnaissance faciale avec une luminosité de rétroéclairage de 80% et une lumière de remplissage éteinte)
- Interface de connexion: UART, I2C
- Affichage: écran IPS de 2,0 pouces avec une résolution de 320x240
- Algorithmes intégrés: Reconnaissance de visage, Suivi d'objet, Reconnaissance d'objet, Suivi de ligne, Reconnaissance de couleur, Reconnaissance de balise