











Description
- Elecrow CrowBot BOLT - Robot Voiture Intelligente Programmable Open Source avec Joystick
- Innovant, open-source, robot voiture programmable
- Équipé de plusieurs capteurs et de capacités Wifi/Bluetooth
- Offre 16 leçons de programmation complètes dans trois langues
- Dispose de deux interfaces d'extension pour plus de 150 modules Crowtail
- Robot éducatif STEAM convivial pour les débutants
Le Elecrow CrowBot BOLT - Robot Voiture Intelligente Programmable Open Source avec Joystick est un robot voiture innovant, open-source et programmable qui fonctionne sur une puce ESP32. Cet appareil est équipé de nombreux capteurs, dont un capteur de lumière, un capteur ultrasonique et un capteur de suivi de ligne. Il dispose également de capacités Wifi et Bluetooth, ce qui en fait un outil polyvalent pour différents environnements de programmation tels que Letscode, Micropython et Arduino.
Le CrowBot BOLT est capable d'exécuter rapidement une gamme de fonctions telles que le suivi de lumière, le suivi de ligne, l'évitement d'obstacles, le contrôle à distance et le spectacle lumineux. En tant que robot éducatif STEAM convivial pour les débutants, le BOLT est conçu pour rendre le processus d'apprentissage et d'enseignement de la programmation robotique à la fois simple et agréable.

Cet appareil est livré avec 16 leçons complètes disponibles dans trois langues : Letscode, Arduino et MicroPython. Ces leçons offrent une programmation graphique riche, permettant aux novices en programmation d'apprendre dans un environnement engageant et créatif.
Le CrowBot BOLT dispose également de deux interfaces d'extension réservées, le rendant compatible avec plus de 150 types de modules Crowtail. Cette fonctionnalité permet une créativité et une exploration illimitées.
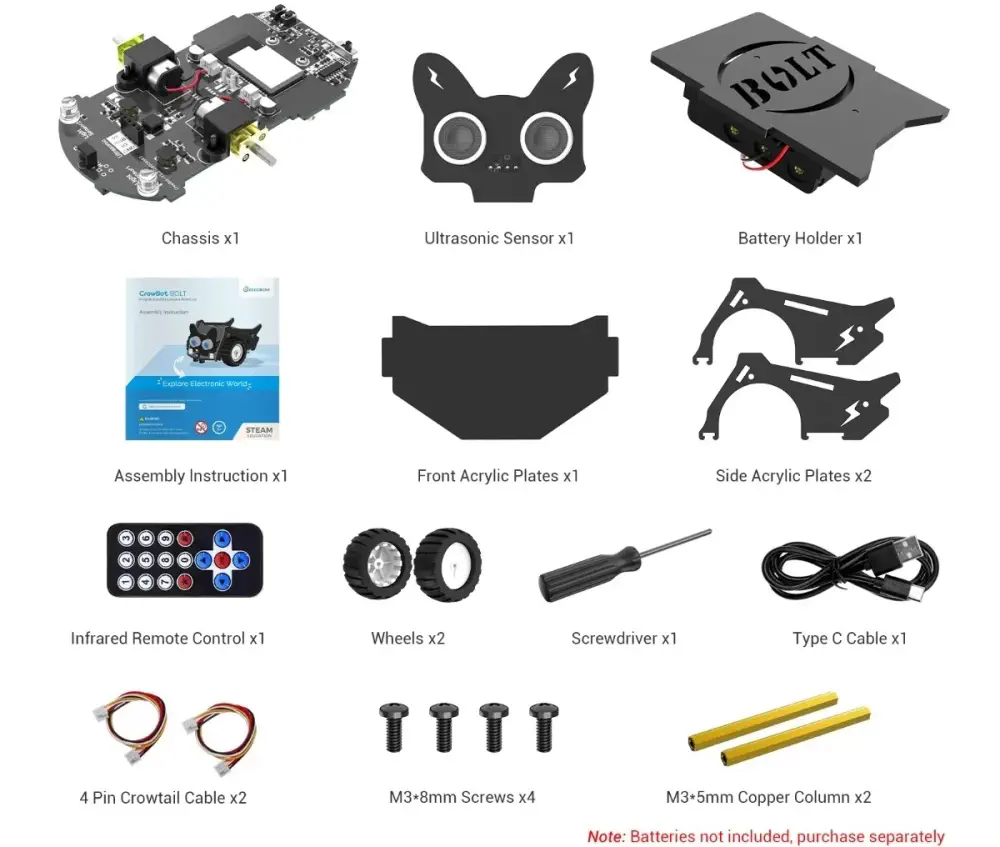
- 1 x Châssis
- 1 x Capteur Ultrasonique
- 1 x Support de Batterie
- 2 x Roues
- 4 x Vis M3*8mm
- 2 x Colonne en Cuivre M3*5mm
- 2 x Plaque Acrylique Latérale
- 1 x Plaque Acrylique Avant
- 1 x Tournevis
- 2 x Câble Crowtail 4-Pin
- 1 x Câble Type C
- 1 x Télécommande Infrarouge
- 1 x Instructions & Carte de Suivi de Ligne
- 128 x 92 x 64 mm
- Processeur : Esp32-Wrover-b (8MB)
- Programmation : Letscode, Arduino, Micropython
- Méthode de contrôle : Télécommande Bluetooth/Télécommande Infrarouge
- Entrée : Bouton, Capteur de lumière, Module de réception infrarouge, Capteur ultrasonique, Capteur de suivi de ligne
- Sortie : Buzzer, Lumière RGB programmable, Moteur
- Wifi et Bluetooth : Oui
- Capteur de lumière : Peut effectuer la fonction de poursuite de lumière ou d'évitement de lumière
- Capteur ultrasonique : Lorsqu'un obstacle est détecté, la trajectoire de conduite de la voiture peut être corrigée pour éviter l'obstacle
- Capteur de suivi de ligne : Peut faire avancer la voiture le long de lignes sombres/noires, en jugeant et corrigeant intelligemment la trajectoire de conduite
- Buzzer : Peut produire des sons/sifflements, offrant une expérience sensorielle plus directe
- Lumière RGB programmable : Grâce à la programmation, elle peut afficher des lumières colorées dans différentes scènes
- Récepteur infrarouge : Reçoit les signaux de télécommande infrarouge pour le contrôle à distance
- Interface : Type C x1, Port I2C x1, Port A/D x1
- Type de moteur : Moteur à engrenages DC micro GA12-N20
- Température de fonctionnement : -10 ~ +55 °C
- Alimentation : 4 piles sèches 1,5V (Piles non incluses)
- Autonomie de la batterie : 1,5 heures
- Poids : 900 g