









Description
- Boîtier Électronique en Aluminium BlueRobotics pour BlueROV2 - Nominal jusqu'à 300m de Profondeur
- Pré-câblé pour une utilisation immédiate
- Peut résister à des profondeurs allant jusqu'à 300 mètres
- Inclut une caméra de résolution 1080p avec un champ de vision de 110 degrés
- Vient avec le logiciel de contrôle ArduSub + BlueOS
Le Boîtier Électronique en Aluminium BlueRobotics pour BlueROV2 - Nominal jusqu'à 300m de Profondeur est une solution complète pour ceux qui cherchent à construire un cadre de ROV personnalisé.
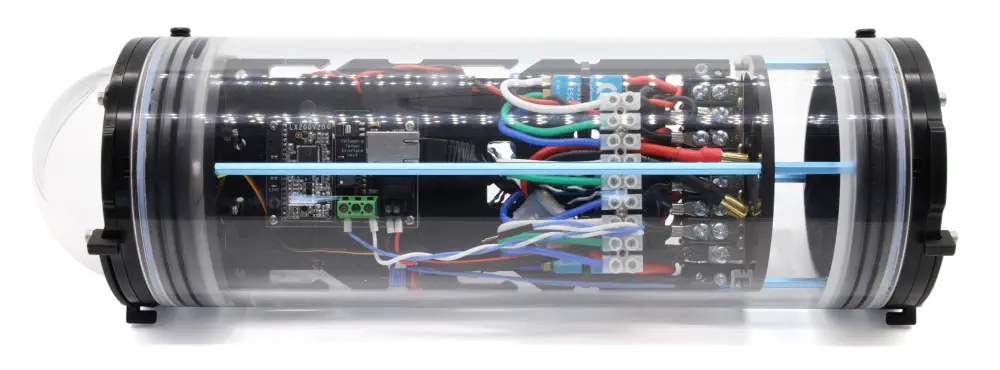
Le boîtier est nominal pour une profondeur de 100 mètres lorsqu'il est associé à un tube en acrylique, et peut résister à des profondeurs allant jusqu'à 300 mètres lorsqu'il est utilisé avec un tube en aluminium. Cela en fait un choix optimal pour ceux qui ont besoin d'une solution électronique et de contrôle prête à l'emploi.
Boîtier de la Série
- 1x Tube de la Série 4 pouces – 11,8 pouces, 300mm (tel que configuré)
- 2x Bride à joint torique de la Série 4 pouces
- 1x Capuchon d'extrémité de la Série 4 pouces
- 1x Capuchon d'extrémité en aluminium de la Série 4 pouces avec 18 trous
Électronique Avancée
- 1x Ordinateur Raspberry Pi 4 Modèle B
- 1x Contrôleur de vol Navigator
- 1x Caméra HD USB à faible luminosité
- 1x Carte d'interface de câble Fathom-X unique
- 1x Carte microSD Raspbian BlueOS (16 GB)
- 1x Alimentation 5V 6A
- 1x Module de détection de puissance Blue Robotics
- 6x ESC de base
Plateau Électronique
- 1x Plateau Électronique de la Série 4 pouces (avec blocs de jonction et matériel)
- 1x Système d'inclinaison de la caméra (avec support pour caméra USB)
- Longueur: 380 mm / 15 pouces
- Largeur: 114 mm / 4,5 pouces
- Hauteur: 114 mm / 4,5 pouces
- Trous de pénétration de câble: 18 M10 x 1,5
- Tube principal (Boîtier Électronique): Blue Robotics série WTE de 4 pouces
- Profondeur maximale nominal: 300 m (985 ft) avec un tube en aluminium
- Plage de température: 0-40 °C (32-86 °F)
- ESC: ESC de base Blue Robotics 30A
- IMU: IMU 6-DOF (sur Navigator)
- Boussole: Double magnétomètres 3-DOF (sur Navigator)
- Pression interne: Baromètre interne (sur Navigator)
- Détection de courant et de tension: Module de détection de puissance Blue Robotics
- Plage d'inclinaison de la caméra: +/- 90 degrés d'inclinaison de la caméra (180 degrés de plage totale)
- Servo d'inclinaison: Hitec HS-5055MG
- Champ de vision de la caméra (sous l'eau): 110 degrés (horizontal)
- Sensibilité à la lumière: 0,01 lux
- Résolution: 1080p
- Système de contrôle: Carte d'interface de câble: Carte d'interface de câble Fathom-X
- Autopilote: Navigateur Blue Robotics
- Logiciel de contrôle: ArduSub + BlueOS
- Poids à l'air: 2,25 kg