



Descripción
- 1x Sensor de Profundidad/Presión de Inmersión BlueRobotics BarXT (Bar3XT 0-3 Bar, ~20m)
- 1x Anillo O de mamparo M10
- 1x Tuerca de mamparo
Eléctrico
- Voltaje de Suministro (Vin): 2,5–5,5 V
- Voltaje Lógico I2C (SDA e SCL): 1,8–3,6 V
- Corriente Típica: 1,5 mA
- Corriente en Reposo: 100 nA
Rendimiento Bar3XT
- Presión Mecánica Máxima: 12 bar
- Presión de Operación: 0–3 bar
- Profundidad de Operación: 0–20 m
- Precisión (0,15% FS): ±45 mbar (±0,46 m en agua dulce)
- Banda de Error Total (0–50°C, 0,7% FS): ±210 mbar (±2,15 m en agua dulce)
- Resolución: 0,91 mbar (90,9 mm en agua dulce)
- Estabilidad a Largo Plazo (típ.): ±3 mbar
Especificaciones
- Tipo de Presión: PA, presión sellada (1 bar referencia absoluta)
- Precisión de Temperatura (típ.): ±2°C
- Resolución de Temperatura: 0,0031°C
Físico
- Peso en Aire (Sin Tuerca): 32 g
- Peso en Agua (Sin Tuerca): 27 g
- Tamaño del Anillo O de Mamparo: AS568-013 Buna-N 70A
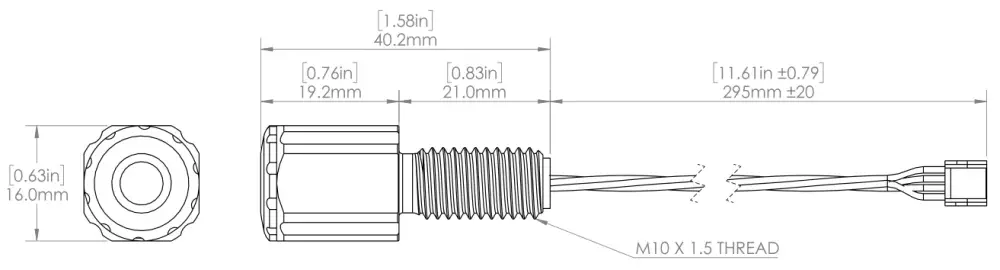
- Rosca del Mamparo: M10 x 1,5
- Tamaño del Orificio de Instalación (Puerto):
- Despeje: 10,0–10,2 mm
- Rosca: M10 x 1,5
- Material del Mamparo/Enchufe: Acero inoxidable 316L, recubierto de óxido negro
- Materiales en Contacto: Acero inoxidable 316L, recubierto de óxido negro, Buna N, Viton, Molykote 111
Interfaz
- Compatible con ArduSub: Sí
- Bibliotecas de Desarrollo: KellerLD-Arduino, KellerLD-Python, KellerLD-ArduPilot
- Dirección I2C: 0x40
- Conector: JST GH de 4 posiciones
- Conector de Acoplamiento: JST GH de 4 posiciones (disponible en Digi-Key)
- Distribución de Pines del Conector:
- Rojo – Vin
- Verde – SCL
- Blanco – SDA
- Negro – GND