













Descripción
- Unidad de 4 ruedas
- Fácil de montar
- Marco de aleación de aluminio
- Velocidad: 0.6m / s
- Se mueve en cualquier dirección sin cambiar la orientación
- Viene ensamblado con solo ruedas no unidas
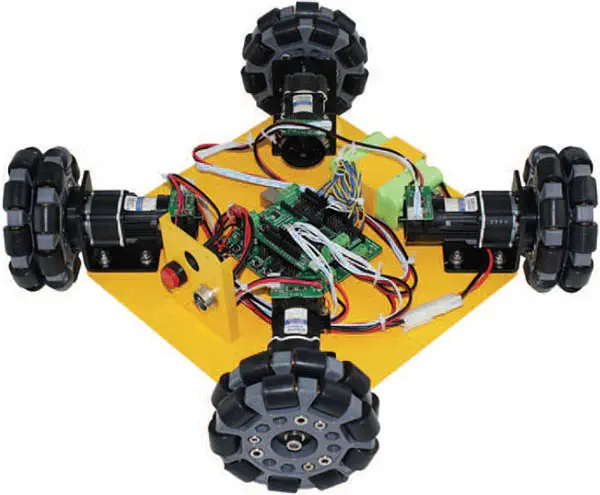
Nexus Robot presenta el Kit de Robot Móvil Omni-Direccional 4WD Compatible con Arduino. Incluye un microcontrolador, expansión IO, motor DC con encoder y al variar la velocidad y la dirección de cada rueda, puede moverse en cualquier dirección sin cambiar su orientación. Es un kit de aprendizaje para que aprendas y disfrutes de la diversión de moverse en omnidireccionalidad.
Las ruedas omnidireccionales son únicas ya que pueden rodar libremente en dos direcciones. Puede rodar como una rueda normal o rodar lateralmente usando las ruedas según sus circunstancias. Las ruedas omnidireccionales permiten que un robot se convierta de un robot no holonómico a uno holonómico. Un robot no holonómico que usa ruedas normales tiene solo 2 de 3 grados de libertad controlables que son: avanzar / retroceder y rotación. No ser capaz de moverse de lado hace que un robot sea más lento y menos eficiente para alcanzar su objetivo. Las ruedas holonomicomni-direccionales son capaces de superar este problema, ya que es altamente maniobrable. A diferencia del robot no holonómico normal, el robot omnidireccional holonómico puede moverse en una dirección arbitraria de forma continua sin cambiar la dirección de las ruedas. Se puede mover hacia adelante y hacia atrás, desliza y gira en la misma posición.
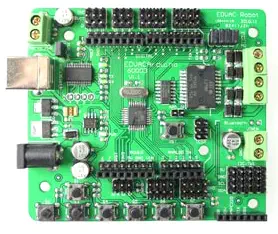
Placa del Microcontrolador Arduino 328
Es una placa de microcontrolador basada en el Arduino 168. Tiene 14 pines de entrada / salida digitales (de los cuales 6 se pueden usar como salidas PWM), 8 entradas analógicas, un oscilador de cristal de 16 MHz, una conexión USB, un conector de alimentación, Encabezado ICSP y un botón de reinicio. Contiene todo lo necesario para soportar el microcontrolador; simplemente conéctelo a una computadora con un cable USB o con un adaptador de AC-DC o batería para comenzar.
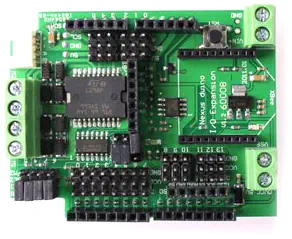
Expansión Arduino IO
Nexus Robot proporciona la máxima expansión funcional para Arduino IO Expansion V1.2 y le brinda más facilidad para conectar dispositivos como sensores, servos y dispositivos RS485. Esta placa de expansión del sensor puede conectar fácilmente varios sensores de uso común.
- 4 x Ruedas Omnidireccionales de 100mm
- 4 x Motores DC con encoder
- 1 x Microcontrolador
- 1 x Placa de expansión IO
Chasis:
- Aspecto: Cuadrado
- Ancho máximo: 402 mm
- Altura: 100 mm
- Altura del chasis: 21 mm
- Base de la rueda: 260 mm
- Modo acoplado: Compactación
- Material: Aleación de aluminio
- Color: Amarillo, Negro
- Velocidad: 0.6m / s
- Modo de manejo: Tracción a las 4 ruedas
- Capacidad de escalada: 20 grados
- Capacidad de carga: 10kg
- Compatible con PC104 : Sí
Rueda:
- Tipo: Rueda Omnidireccional de 90 grados
- Diámetro: 100 mm o 123 mm
- Espesor: 38 mm
- Material: Poliuretano
- Capacidad de carga: 20kg
- Diámetro del rodillo: 19 mm
- Longitud del rodillo: 19 mm
- Modo acoplado: Tubo o rodamientos de latón