





Descripción
- Voltaje: + 5V
- Los codificadores están diseñados para DFRobot 3PA y 4WD Rovers
- Puede darle el grado de rotación de las ruedas
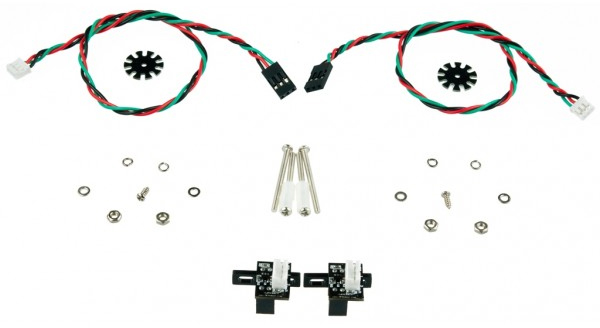
- Incluye codificadores, tubo de plástico, junta mediada por papel, etc.
Los Codificadores de Rueda DFRobot para DFRobot 3PA y 4WD Rovers (2pk) están diseñados para los rovers 3PA y 4WD del fabricante. Puede darle el grado de rotación de las ruedas. El codificador utiliza un método sin contacto para convertir las señales de desplazamiento angular. Ajuste óptimo con el Motor Micro DC de Engranaje. Incluye codificadores, tubo de plástico, junta mediada por papel, etc.
Archivo ZIP
- Voltaje: + 5V
- Corriente: <20mA
- Resolución: 20 PPR
- Peso: 20g