



Descripción
- Brazo robótico de seis ejes con una interfaz de control abierta
- Diámetro de alcance de 2,2 metros y capacidad para levantar 4,5 kg (10 libras)
- Control de posición de bucle cerrado en las 6 articulaciones
- Construcción mecanizada CNC de aluminio y fibra de carbono
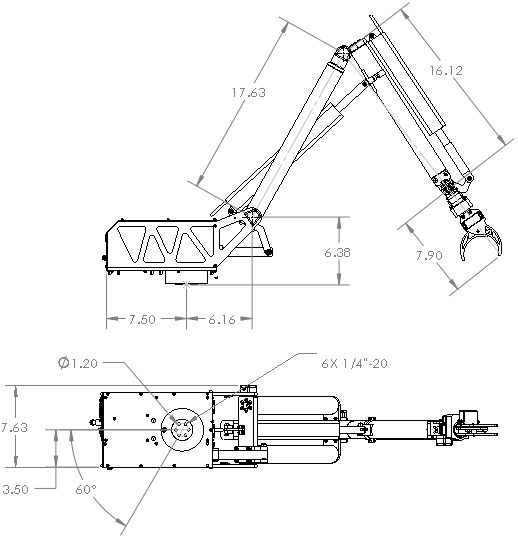
El Manipulador Robótico Avanzado (ARM 3.0) - Lazo cerrado es un brazo robótico de seis ejes con una interfaz de control abierto para permitir la implementación simple en otros proyectos. Se ordena a cada articulación que se posicione mediante señales RC PWM. Los segmentos de fibra de carbono y el aluminio de grado aeronáutico mecanizado por CNC hacen del ARM 3.0 una unidad robusta. Con un diámetro de alcance de más de 2 metros y capacidad para levantar 4,5 kg (10 libras), es un valor ARM muy capaz.

Este brazo de 6 grados de libertad utiliza actuadores lineales y servos giratorios para proporcionar una envolvente de operación de más de 7 pies de diámetro. Los rodamientos de bolas sellados proporcionan un movimiento de precisión en cada unión. Las 4 articulaciones inferiores usan codificadores absolutos para un control lineal preciso. El consumo de corriente típico a plena capacidad es de aproximadamente 7 amperios. La velocidad de rotación de la junta base es de 60 grados/segundo. La muñeca gira 240 grados en 2,3 segundos. La pinza se mueve de completamente abierta a completamente cerrada en menos de 1 segundo. La protección de energía inversa y la protección contra sobrecorriente están incorporadas en la unidad. Un interruptor de encendido con indicación de estado "encendido" del LED verde se encuentra en la caja de componentes electrónicos.
Control de posición de lazo cerrado
Todas las uniones funcionan en un modo de control de posición de bucle cerrado. Todas las uniones están preparadas para PWM si elige ordenar desde su microcontrolador o desde una radio RC. Todas las juntas utilizan retroalimentación absoluta. Esta versión del ARM es más adecuada para aplicaciones donde el ARM estará bajo control de la computadora y donde la computadora enviará un comando PWM a cada articulación del ARM para ir a una posición específica. El ARM entonces mantendrá esa posición.

Mejoras sobre el brazo 2.0
El ARM 3.0 aprovecha el éxito de los proyectos ARM 1.0 y 2.0. Reemplaza a ARM 2.0 y proporciona un mejor rendimiento. Mayor confiabilidad y más capacidad de elevación son mejoras notables, así como mejores rangos de viaje optimizados para cada articulación. La retroalimentación absoluta del codificador en las articulaciones mejora el control y la resolución de retroalimentación de posición y la linealidad.
Características
- Mantiene la posición en las 4 articulaciones inferiores con el apagado
- Comentarios lineales absolutos de cada articulación
- El robusto recinto de aluminio alberga electrónica de control
- Conector DB-25 para entrada de potencia y señal
- Interruptor de encendido/apagado en la base
- Segmentos de fibra de carbono
- Compatible con unidades de control de radio convencionales
- LED indicador de energía
- Conexión inversa protegida
Aplicaciones
- Proyectos de investigación de controles robóticos
- Laboratorios de ingeniería universitaria
- Manipulador para vehículos de tierra no tripulados
- Competiciones robóticas
- Prueba de productos en ambientes peligrosos
Archivo PDF
- Envolvente de alcance: 86,6 pulgadas (2,2 m) de diámetro
- Capacidad de elevación: 10 lb (4,5 kg) en extensión completa
- Interfaz: RC PWM
- Entrada: 12 V DC, 7,5A (pico)
- Peso: 20,4 lbs (9,2 kg)