

















Description
- UBTECH Robotics Walker S2 industrial humanoid robot with 52 DoF
- Dual Gen-4 dexterous hands, includes charging station and two batteries
- 3-minute autonomous battery swapping system
- Flexible waist with a 125° pitch range (+90° to –35°) and ±162° rotation
- Handles up to 15 kg payload
- Human-eye stereo vision with Co-Agent swarm intelligence and BrainNet 2.0 dual-loop AI system
The UBTECH Walker S2 Industrial Humanoid Robot is a full-body bipedal platform engineered for deployment in demanding industrial environments. Built around a 52-DOF kinematic architecture and fourth-generation dexterous hands, it is capable of performing precise manipulation tasks including gripping, assembly, inspection, and material handling. A flexible waist joint with a 125-degree pitch range and wide rotational reach enables the robot to operate across the full vertical workspace typical of human workstations. Walker S2 is designed for factory floors, automotive and aerospace production lines, warehouses, and distribution centers where human-level physical capability is required.
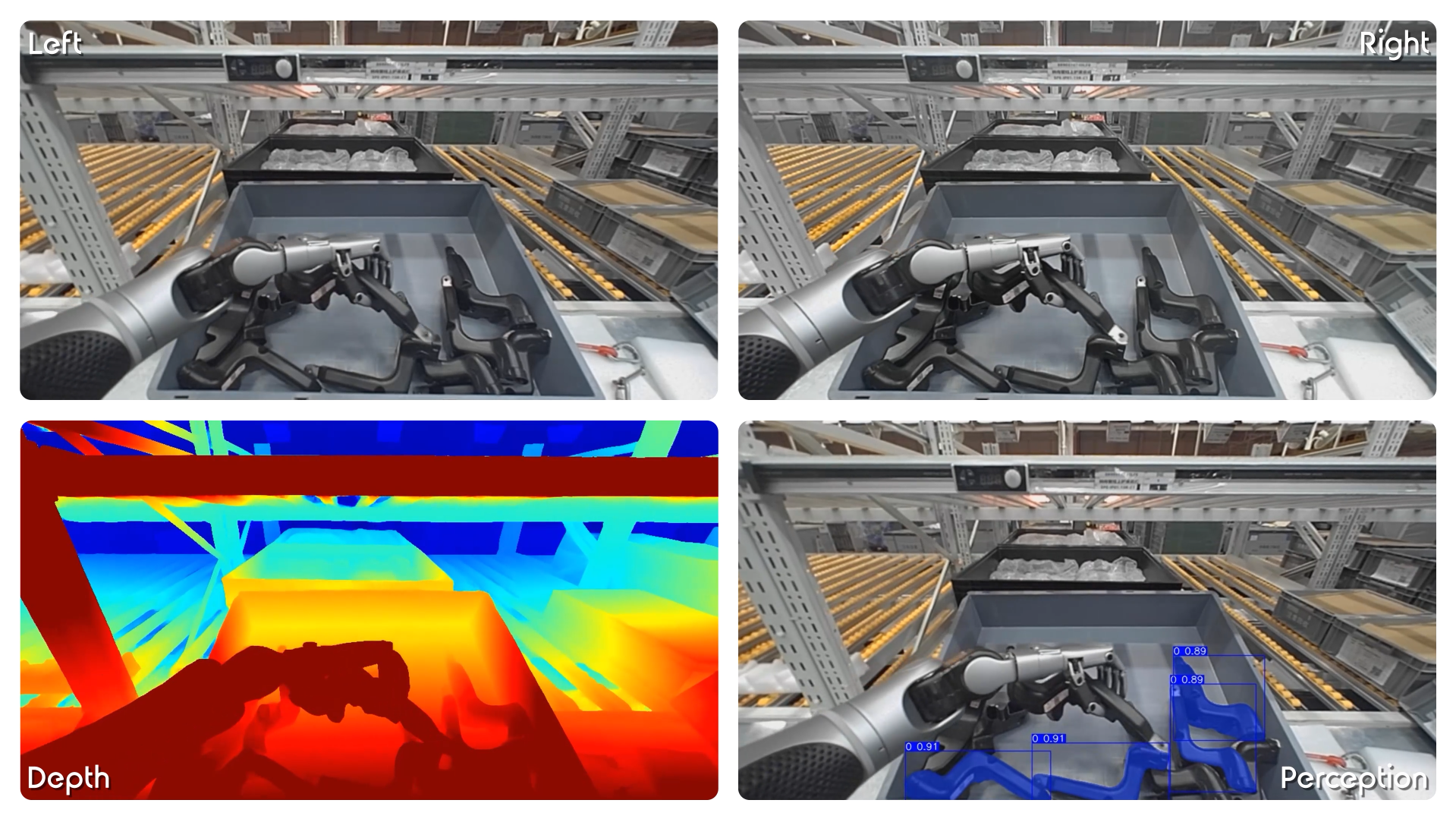
Walker S2 is powered by a dual-loop AI architecture combining BrainNet 2.0 for autonomous decision-making and task decomposition with a Co-Agent swarm intelligence framework for coordinated multi-robot workflows. Its perception system integrates RGB binocular stereo vision with fisheye cameras and deep-learning depth estimation, providing real-time spatial awareness in dynamic environments.

Genuine products with manufacturer-approved warranty coverage.

Customs, inspection, and prep handled locally before shipment.

Sales, support, and returns managed by one team.

Docs, tutorials, and community answers to move faster.



Walker S2 integrates advanced AI, multi-modal perception, and an open software ecosystem to support autonomous operation and developer-driven customization across industrial applications.

RGB binocular stereo vision combined with fisheye cameras and deep-learning depth estimation generates real-time 3D spatial maps. This enables reliable object recognition, obstacle avoidance, and navigation in unstructured industrial environments.

The dual-loop BrainNet 2.0 system handles task decomposition, decision-making, and real-time adaptation, while the Co-Agent swarm intelligence framework enables coordinated multi-robot operation. Together they support autonomous planning and execution without constant human supervision.

Walker S2 is built to handle tasks in industrial environments where human workers are present, operating within defined safety zones and under the supervision of UBTECH-certified operators. Its perception system supports real-time awareness of the surrounding environment to assist with task execution and navigation.

Walker S2 runs on Ubuntu and ROSA 2.0 and supports OTA firmware upgrades for software maintenance and feature updates. Connectivity via Wi-Fi, Bluetooth, Ethernet, and optional 5G enables integration with cloud systems, unmanned logistics vehicles, and intelligent manufacturing management platforms.


Included
| • | UBTECH Walker S2 Humanoid Robot |
| • | Charging Station (w/ 2 Batteries) |
| • | Dexterous Hands |
| • | 1760 mm |
| • | Approx. 70 kg |
Documents
| • | Product Manual |
| Mechanical | |
| Robot Type | Industrial Humanoid Robot |
| Degrees of Freedom (DOF) | 52 |
| Payload Capacity | Up to 15 kg |
| Workspace | 0 – 1.8 m |
| Maximum Walking Speed | Up to 2.0 m/s |
| Waist Rotation | ±162° |
| Hands | 4th-generation dexterous hands (11 DOF per hand) |
| Perception & Sensors | |
| Vision System | RGB binocular stereo vision |
| Sensors | Depth sensors, IMU, force sensors, tactile sensors |
| AI & Computing | |
| AI System | BrainNet 2.0 + Co-Agent swarm intelligence |
| Compute Platform | Intel Core i7 + NVIDIA Jetson AGX Orin |
| Operating System | Ubuntu + ROSA 2.0 |
| Power & Connectivity | |
| Battery System | Li‑FePO₄ (lithium‑iron‑phosphate) 48 V |
| Battery Swap Time | ~3 minutes (autonomous) |
| Connectivity | Wi-Fi, Bluetooth, Ethernet (optional 5G) |