















Description
- RealMan Robotic Arm RM65-B, 6 Degrees of Freedom
- Payload: 5kg
- Features an ultra-lightweight humanoid robotic arm
- Built-in safety module
- Provides faster returns on automation
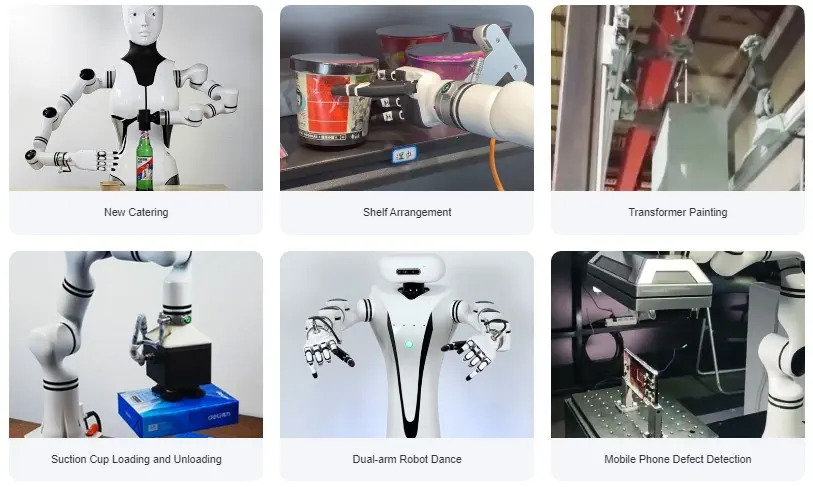
- Suitable for a wide range of scenarios
The RealMan Robotic Arm RM65-B, 6 DoF, 5kg Payload (Basic Version) is a basic version of the 6-DoF robotic arm and is self-developed and produced by RealMan. The robotic arm integrating the controller weighs 7.2 kg in total, with a payload of 5 kg, a peak load of 9 kg, and a working radius of 610 mm. Provide faster returns on automation and intelligent upgrading solutions for industries such as automotive parts, 3C electronics, metal processing, food packaging, medical health, new retail, etc.
The ultra-small volume, coupled with a multi-platform interface system, makes it more suitable for a wide range of compound application scenarios. The robotic arm has a built-in safety module that stops upon touch, achieving human-machine safety cooperation, simplifying drag-and-drop teaching and making human-machine cooperation more user-friendly.
Integrated Modularization: Integrated and modular design, easier disassembly and assembly, lower maintenance costs, and higher efficiency.
Ultra-high Load-to-self-weight Ratio: Ultra-lightweight body, with the self-weight of the robotic arm (including controller) being only 7.2 kg, payload up to 5 kg, 1:1.44 load-to-self-weight ratio, and an effective working radius of up to 610 mm.
Flexible Deployment: Ultra-small volume, with a maximum robotic arm diameter of 11.5 cm and a base installation diameter of 11 cm. The size of humanoid robotic arm greatly reduces the installation space requirements, making it more convenient and flexible.
Ultra-low Power: DC power supply of 24 V, suitable for mobile power supply, with a maximum power consumption of ≤ 200 W and a comprehensive power consumption of ≤ 100 W under full load, and can be applied in various scenarios.
Integrated Controller: No traditional control cabinet, perfectly integrating the controller with the robotic arm.
Ultra-high Compatibility: The end offers a general interface that is expandable and plug-and-play. The integrated robotic arm has rich interfaces to meet the expansion of application needs in a variety of industries.
Open System: Open API function library, supporting C/C++/C#/Python programming language, and supporting Windows/Linux/ROS robot operating systems and various communication protocols.
Safe and Sensitive: Sensitive drag and drop programming, which can fully reproduce the drag trajectory; The protection level can be set, and the robotic arm will stop immediately when the collision reaches the maximum torque limit, thereby avoiding injury to personnel or equ.
Wireless and Convenient Connection: Connection and control of the robotic arm by wired and wireless means, easy and quick switching, and liberation from the limits of control cables.
- 1x RealMan Robotic Arm RM65-B, 6 DoF, 5kg Payload (Basic Version)
- Repeatability: ±0.05 mm
- Working radius: 610 mm
- Degree of freedom: 6
- Payload: 5 kg (max 9 kg)
- Body weight: 7.2 kg
- Payload-to-Weight Ratio: 1:1.44
- Max Reach: 610 mm
- Joint motion range: J1 ±178°, J2 ±130°, J3 ±135°, J4 ±178°, J5 ±128°, J6 ±360°
- Joint maximum speed: J1-J2 180°/s, J3-J6 225°/s
- Footprint: 110 mm
- Cartesian Velocity Limits: 1.88 m/s end effector speed
- Repeatability: ±0.05 mm
- Mounting Orientation:
- Vertical: Table/ Ceiling
- Horizontal: Wall
- Control Cabinet: Integrated
- Communication: WIFI / Ethernet (TCP/IP) / Modbus-RTU / BLT / USB / RS485
- API compatibility: Ubuntu, ROS1, ROS2, Rviz, Moveit, Gazebo
- Control:
- Intuitive: Drag teaching, Graphic programming
- Advanced: C, C++, C#, Python, MATLAB, JSON
- Low-level: Position, Velocity, Current
- Advanced-level: Cartesian position/velocity, Joint position/velocity
- Control system frequency:
- Controller to joints, 1kHz
- Computing system to joints, 2ms
- Power Consumption: Max 200W, Avg. 100W
- Supply Voltage: 24V, 20V - 30V
- IP Grade: IP54