















Description
- Leo Rover v1.8 Developer Kit (Unassembled)
- Features a 4WD outdoor robotics kit
- Open-source and built on Raspberry Pi
- Designed to be reliable, watertight, and extendable
- Payload capacity: ca. 5 kg
- Features Video streaming and driving UI
The Leo Rover v1.8 Developer Kit features an outdoor robotics kit and is designed to be reliable, watertight and extendable.
It uses 4 in-hub DC motors with 73.2:1 planetary gearbox and 12 CPR encoder and drives on 4 wheels with 130 mm diameter and rubber tires with foam insert (non-pneumatic).

The estimated maximum obstacle size is 70 mm while running circa 4 hrs of nominal driving. While live video streaming you can connect to the Leo Rover up to a distance of 100 meters. Its camera has a resolution of 5 MPx and uses a Fisheye lens with a 160 deg field of view.

By default Leo Rover is remotely controlled with video streaming and UI ready-to-go. It's not autonomous, but it's autonomy-ready. The software is based on Ubuntu 20.04 and Robot Operating System (ROS) which is known for easiness of autonomy and semi-autonomy features implementation.
The simplest way is to add a lidar or stereovision camera to enhance the Rover self-navigation and then build your features on top of that. The Rover itself has one front camera and 4 wheel encoders on board, so it provides video streaming and basic odometry out-of-the-box.

Please note: As the manufacturer constantly works on improving the design, the Rover you receive may look and act little differently than seen in the videos and demos.
- 1x Leo Rover v1.8 Developer Kit (Unassembled)
- 1x Battery charger
- 1x Hex-head screwdriver to mount/dismount additional modules
- Access to the official community Slack pivate channel for support, troubleshooting and help with integrations
Tools needed to assemble: everything is in the box.
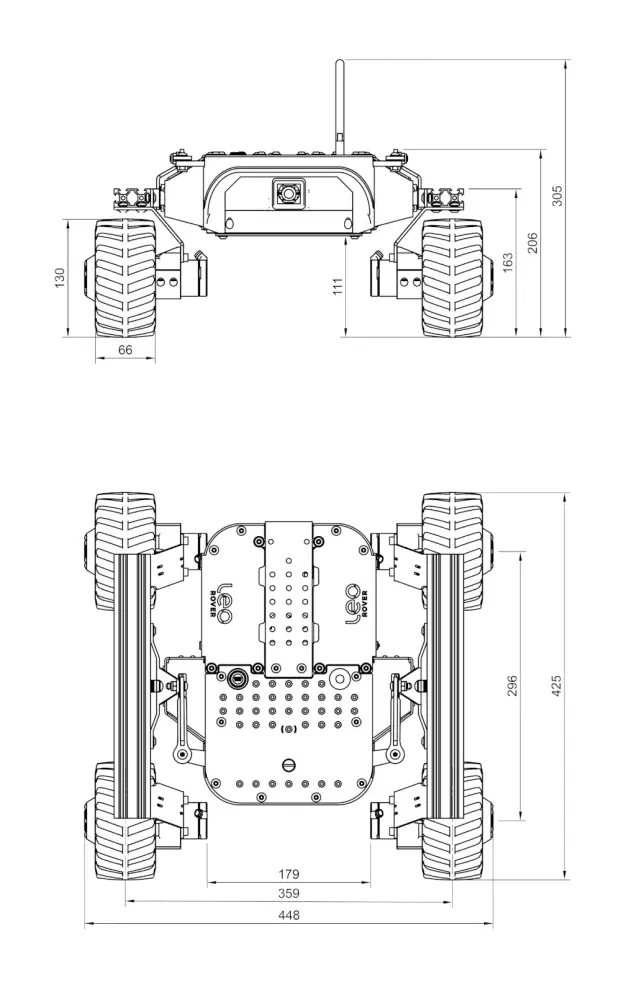
Size
- Weight: 6,5 kg
- Size: 448 x 425 x 305 mm
- Payload capacity: ca. 5 kg
Upper platform mounting Size
- Size: 299 x 183 mm
- Hole grid: 18 x 15 mm
- Holes: 40 x Φ 7mm + 22 x Φ 5,5 mm
Performance
- Estimated maximum obstacle size: 70 mm
- Protection rating: complies with IP55 (not certified)
- Run time: Estimated 4 hrs of nominal driving
- Connection range: Up to 100 m (with live video stream)
Wheels
- Motors: 4 x in-hub DC motor with 73.2:1 planetary gearbox and 12 CPR encoder
- Wheel diameter: 130 mm
- Tire material: rubber with foam insert (non-pneumatic)
Battery
- Voltage: 11.1 V DC
- Capacity: 5000 mAh
- Type: Li-Ion with internal PCM Short-circuit, overcurrent and overdrain safety features
- Max. current: 8 A (total for the whole Rover)
Camera
- Camera resolution: 5 MPx
- Lens: Fisheye with 170 deg field of view (IR non-filtered; night-vision allowed)
Network
- WiFi 2.4 GHz access point with external antenna
- WiFi 2.4 GHz + 5 GHz on internal RPi antennas for connectivity
Software
- Operating system: LeoOS based on Ubuntu 20.04 + ROS Noetic. ROS2 support
- Ready-to-go UI located under '10.0.0.1' when using standard Leo Software Image
- Open source firmware
Electronics
- RaspberryPi 4B 2GB (or higher) as the main computer
- LeoCore as real-time microcontroller: STM32F4 (@84MHz, 64KB RAM, 256KB Flash)
Speed
- Max. linear speed: ca. 0.4 m/s
- Max. angular speed: ca. 60 deg/s
Connection interfaces - Externally available
- 1x Waterproof microUSB Socket
- 1x Antenna RP-SMA Male Socket
- 1x 3-Pin Weipu SP13 12V Power Socket
Connection interfaces - Internal open interfaces
- RaspberryPi's: 2x USB, 20x GPIO, RJ45 Ethernet, 1x RPi display port, Bluetooth 5.0 with BLE
Controller
- You need any web-enabled device to access stock UI under '10.0.0.1' in your browser.
- Device requirements: Windows/Linux/Android/macOS
- For easier development ROS on your device is highly recommended.