
Descripción
- Mano Táctil Unitree Dex3-1 para Unitree H2 (Derecha)
- Ofrece una mano hábil de tres dedos con 7 grados de libertad
- Diseñada para operación versátil
- Con control híbrido de fuerza–posición
- Proporciona tanto sensibilidad como fiabilidad
La Mano Táctil Unitree Dex3-1 para Unitree H2 (Derecha) es una mano robótica altamente hábil controlada por potencia, diseñada para operación versátil. Con control híbrido de fuerza–posición, proporciona tanto sensibilidad como fiabilidad, permitiendo la manipulación precisa de objetos.

La Dex3-1 es una mano hábil de tres dedos con 7 grados de libertad y 7 ejes de movimiento independientes: seis microjuntas sin escobillas de control de fuerza de accionamiento directo y una microjunta sin escobillas de control de fuerza de accionamiento por engranajes. Equipada con 33 sensores táctiles, ofrece retroalimentación detallada para un control avanzado. Puede emparejarse con el robot humanoide Unitree G1 para ejecutar una amplia gama de tareas complejas.
- 1x Mano Táctil Unitree Dex3-1 para Unitree H2 (Derecha)
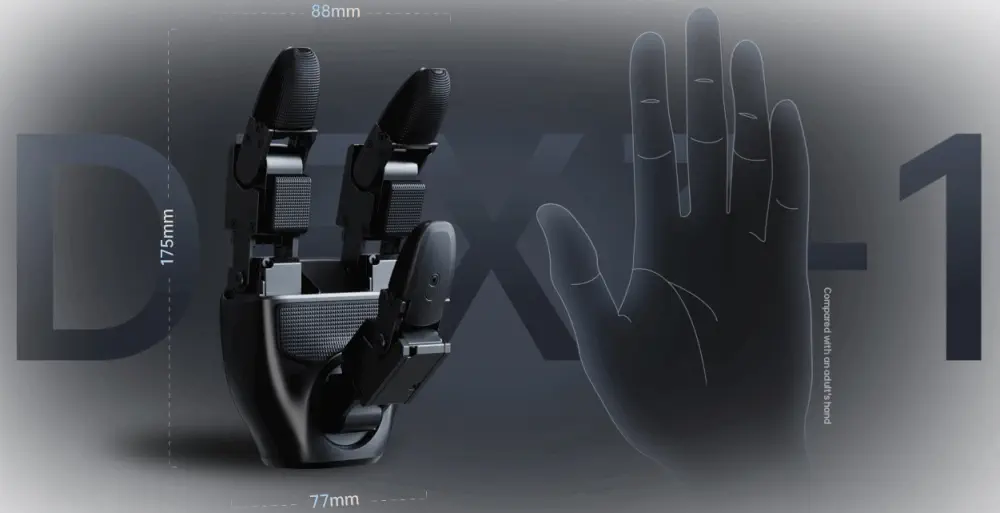
- 88 x 77 x 175 mm (L x A x Al)
- Grados de Libertad
- Pulgar x3
- Dedo Índice x2
- Dedo Medio x2
- Mecanismo de Transmisión
- 6 Motores Accionan Directamente
- 1 Motor Acciona con Engranajes
- Ángulo de la Articulación
- Articulación del Pulgar 0: -60°~60°
- Articulación del Pulgar 1: -35°~60°
- La Articulación del Pulgar 2: 0 a 100°
- Articulación del Dedo Índice 0: 0 °~90°
- Articulación del Dedo Índice 1: 0 °~100°
- Articulación del Dedo Medio 0: 0 °~90°
- Articulación del Dedo Medio 1: 0 °~100°
- Precisión de Repetición de Posicionamiento de la Punta del Dedo: ±2 mm
- Voltaje de Trabajo: 12 ~ 58 V
- Corriente Estática: 58 V a 0,2 A
- Corriente Máxima: 10 A
- Interfaz de Comunicación: USB 2.0
- Rango de Temperatura de Trabajo: -20 °C ~ 60 °C
- Condiciones de Carga (Palma Hacia Abajo a Temperatura Ambiente, Agarrando un Objeto Duro Redondo de 5 cm)
- El Peso Máximo es 500 g
- La Potencia Máxima es: 400 W a 3 s
- Condición de Carga (Palma Hacia la Izquierda a Temperatura Ambiente, Agarrando un Objeto Duro Redondo de 5 cm)
- El Peso Máximo es 500 g
- La Potencia Máxima es: 400 W a 3 s
- Número de Sensores de Presión: 9 (Total de 33 Sensores de Presión)
- Resolución de la Matriz
- 2x2 (Palma) x3
- 2x2 (Pad de Dedo Único) x3
- 3x1 (Punta de Dedo Único) x3
- Rango de Percepción: 10 g-2500 g
- Aceptación Máxima (No Dañada): 20 kg
- Tasa de Comunicación: 1000 Hz
- El número de bytes en un paquete completo
- Emisor: 1234 bytes
- Receptor: 1270 bytes
- Retroalimentación Perceptual: Modo de Articulación, Posición de Articulación, Velocidad de Articulación, Torque de Articulación, Temperatura de Articulación, Voltaje y Corriente, Valor de Presión del Sensor, Valor de Temperatura del Sensor, Datos imu
- Retroalimentación de Control: Modo de Articulación, Posición de Articulación, Velocidad de Articulación, Torque de Articulación, Coeficiente de Rigidez de Articulación, Coeficiente de Amortiguación de Articulación
- Peso: 710 g