

















Zahlungen und Sicherheit
Ihre Zahlungsinformationen werden sicher verarbeitet. Wir speichern keine Kreditkartendaten und haben keinen Zugriff auf Ihre Kreditkarteninformationen.
Beschreibung
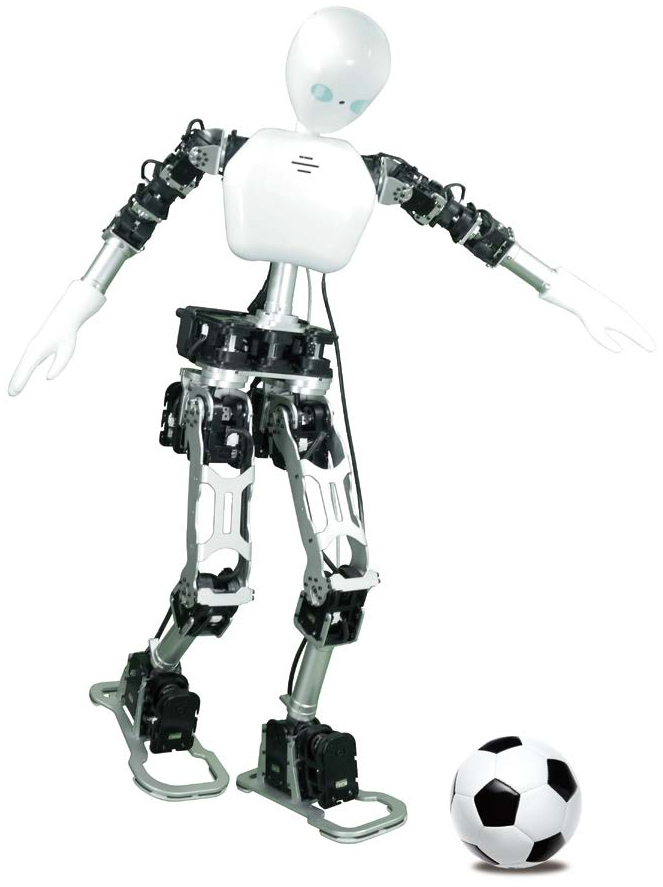
- Gut proportionierter, 1 m großer Roboter in humanoider Form
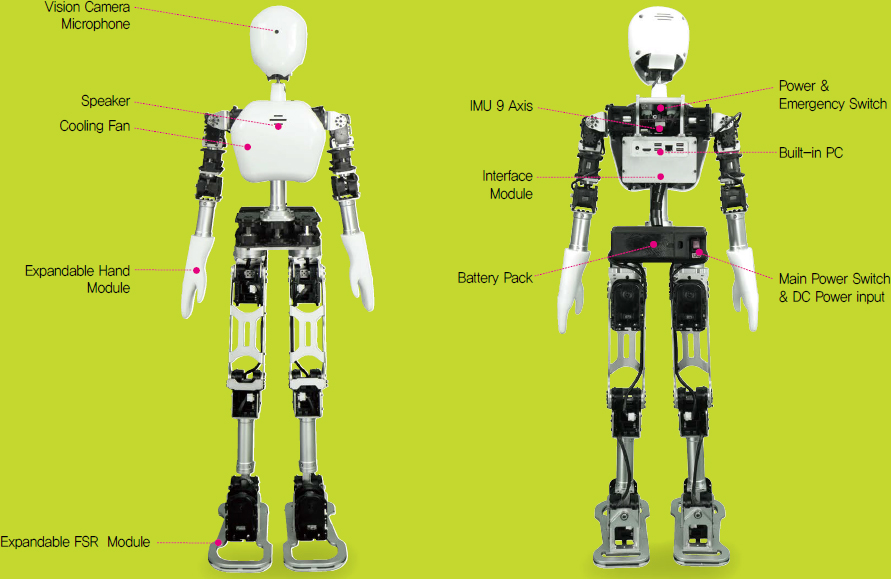
- Sturzerkennungsalgorithmus mit einem 9-Achsen-IMU-Sensor
- Bildverarbeitung mit 300 FPS bei 320 x 240 Pixeln
- Unterstützt vollständig den Fußballmodus für Robocup-Wettbewerbe
- Gehalgorithmus für zweibeinige humanoide Roboter mit Balancesteuerung
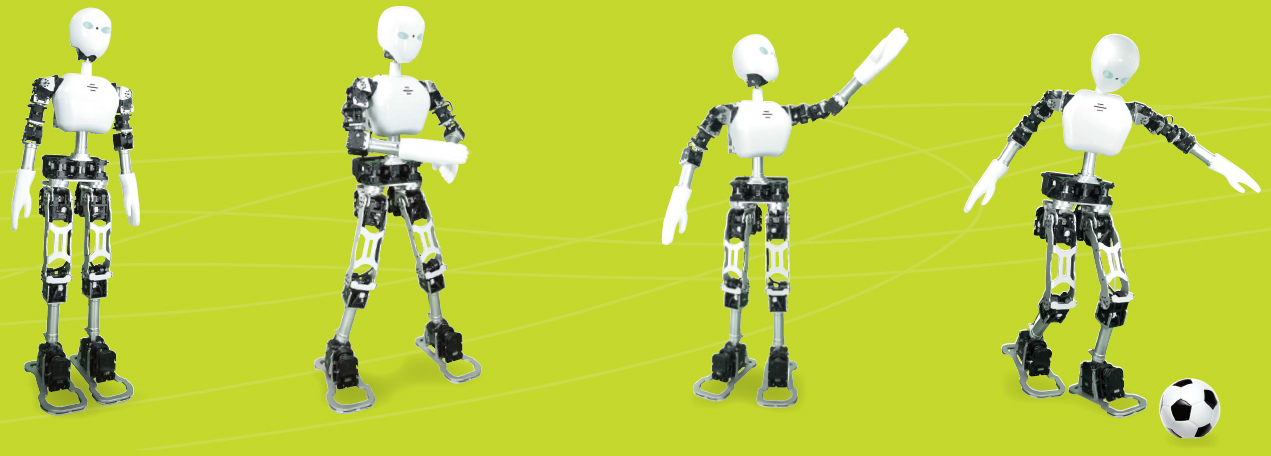
Der Robobuilder UXA-90 Humanoid Robot ist ein gut proportionierter, 1 m großer Roboter in humanoider Form. Es wurde mit einer Struktur entworfen, die dem Verhältnis des idealen menschlichen Körpers ähnelt. Da die Skelettstruktur des Roboters die eines Menschen imitiert, ist es möglich, menschenähnliche Bewegungsmuster zu erzeugen. Da es verschiedene Programmierquellen verwendet, kann es auf viele verschiedene Arten gesteuert werden. Der Roboter verfügt außerdem über vorprogrammierte emotionale Gesten und Mundausdrücke mit synchronisierten Geräuschen.

Bereitgestellte Quelldateien für das gesamte Karosseriedesign und vorgefertigte STEP-Dateien für Außen- und Grundrahmen
Benutzer können mit den verschiedenen vorgefertigten Quelldateien ein neues Erscheinungsbild für den Roboter erstellen. Die Quelldateien enthalten Details zum Zusammenbau der Struktur wie Größe, Position der Geräte, Schrauben und Muttern.
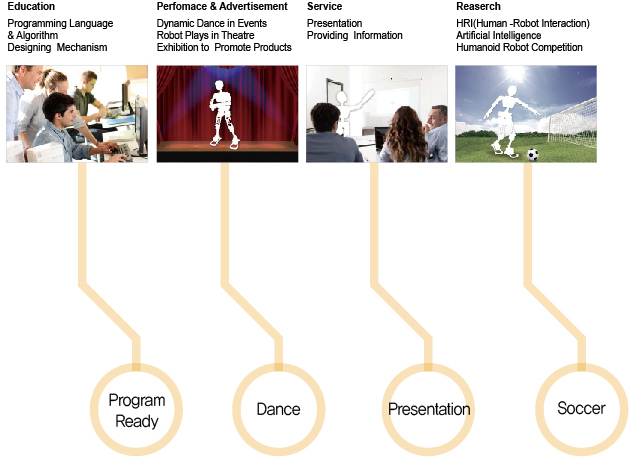
Bieten Sie verschiedene Anwendungen an
Von einer Performance auf der Bühne bis hin zu einer Präsentation im Namen einer Person macht dieser Roboter alles. Darüber hinaus kann der Roboter zur Teilnahme an einem humanoiden Roboterwettbewerb eingesetzt werden und kann auch als Plattform in der Forschung für HRI und KI sowie in der Ausbildung zum Programmieren verwendet werden.
Ausbildung
- Programmiersprache & Algorithmus
- Konstruktionsmechanismus
Leistung & Werbung
- Dynamischer Tanz in Events
- Roboter spielt im Theater
- Ausstellung zur Förderung von Produkten
Service
- Präsentation
- Bereitstellung von Informationen
Forschung
- HRI (Mensch-Roboter-Interaktion)
- Künstliche Intelligenz
- Humanoider Roboterwettbewerb
Bereitstellung verschiedener Quellcodes und Bibliotheken für die Programmierung auf Basis von Open Source
Windows-basierte Objekterkennungssoftware
- Visual C#-Quellcode zum Verfolgen eines Objekts mit Bildverarbeitung
- UXA90 kann beim ROBOCUP-Wettbewerb alleine Fußball spielen
Verwaltungssoftwaretools
- SAM-Steuerungssoftware zur individuellen Verwaltung von Servos
- Inhalts- und Bewegungserstellungstool
- Verhaltensmuster-Planungstool
- Bewegungsmanagement-Tool
Android-basiert
- Android-App zum Steuern und Erstellen
- Die Android-App steuert und erstellt drahtlos Verhaltens- und Bewegungsmuster
Linux-basiert
- ROS-basiertes Framework
- Pavillon für 3D-Starrkörperdynamiksimulation
- Rviz-Plugin für 3D-Visualisierungsumgebung
Merkmale
- Körperdesign, das dem vitruvianischen Menschen von Da Vinci ähnelt
- Sehr gut darin, den Ball zu schießen und das Netz zu lokalisieren
- Sprechen und Abspielen von Sounds mit 3W-Lautsprecher
- Farbe und Form eines Objekts (z. B. einer orangefarbenen Kugel) erkennen und verfolgen
- Entfernungsberechnungen in Echtzeit
- Eingebettete automatische Aufstehverhaltensfunktion aus der Rückenlage
- Stellen Sie ein Software-Tool für die einfache Erstellung von Leistungsbewegungen bereit
- Performance-Bewegung kann vollständig mit der Tonquelle synchronisiert werden
Roboter
- Höhe: 100 cm
- Breite: 35 cm
- Gewicht: 9 kg
- Gehgeschwindigkeit: 30 cm/s, Voller Schritt vorwärts
PDF-Datei
Freiheitsgrade (DoF - Degrees of Freedom)
- 23 DOF
- 12 DOF Bein, 8 DOF Arm
- 1 DOF Taille, 2 DOF Kopf
4-DOF-Arm (x2)
- Ellbogen: 2 DOF SAM30 x2
- Schulter: 2 DOF (SAM160 x1/ SAM100 x1)
6-DOF-Bein (x2)
- Hüfte: 3 DOF (SAM160x1 / sam210x2)
- Knie: 1 DOF (SAM210 x1)
- Knöchel: 2 DOF (SAM210 x2)
- 1-DOF Taille (x1): 1 DOF (SAM160x1)
- 2-DOF-Kopf (x1): 2 DOF (SAM30 x2)
Sensoren
- Trägheit: IMU 2g 9axis, +- 180 Grad (Roll/Gier), +-90 Grad (Pitch)
- FSR-Modul (optional) x2: 4 Sensoren in jedem Fuß
Computer
- CPU: Intel Core i3-1115G4 Prozessor (6m Cache, bis zu 4,10GHz),
- Samsung DDR4 8GB PCS-21300
- Crucial P2 M.2 NVMe 250GB TLC
- Kabellos: Bluetooth / Intel WI-FI 6 AX201
Externe Schnittstellen
- USB 2.0 x2, Ethernet 10/100/1000 Base-T
- USB 3.0 x2, HDMI x1
Schnittstellen
- Lautsprecher: 1 Satz
- Mikrofon: 1 Satz
- Vision-Kamera: HD 1.920 x 1.080 px
Batterie
- Typ: LiPo 18.5V, 3.000 mA
- Betriebsdauer: 20 min (häufige Bewegung) / 40 min (Stand-by)
- Ladezeit: 30 min
Betriebssystem: Windows 7 oder Linux Ubuntu 14.04
Windows-basiert
- Easy Motion Building-Software / C#-Anwendung im Fußballmodus / MSRDS-Beispiele mit Kinect-Sensor
- Autonomer Fußballmodus, Leistungsmodus, Präsentationsmodus
- Vorprogrammierte Geh- und Leistungsbewegungen
Linux Ubuntu 20.04 LTS (ROS1 Noetic, OpenCV 4.xx, QT-Compiler)
- ROS-Basis-Middleware-Paket
- Pavillon für 3D-Simulation der Starrkörperdynamik
- Rviz-Plugin für 3D-Visualisierungsumgebung
- Gehen / Greifen / Erkennungskontrolle